Găsiți o transformare afină. Probleme inverse ale transformărilor afine sau o formulă frumoasă
Transformarea afinelor este o astfel de conversie care păstrează paralelismul de linii, dar nu neapărat unghiuri sau lungime.
În graficul de calculator, totul se referă la un caz bidimensional este făcut pentru a semna un simbol 2D (2 dimensiuni). Să presupunem că sistemul de coordonate rectilinie este introdus în avion. Apoi, fiecare punct M este pus în conformitate cu o pereche ordonată de numere (x, y) a coordonatelor sale (figura 1).
Formulele de mai sus pot fi considerate două: fie punctul este conservat, iar sistemul de coordonate se schimbă în acest caz, punctul arbitrar M rămâne același, numai coordonatele sale (x, y) Schimbarea (X *, Y *) sau punctul este modificată și sistemul de coordonate este stocat în acest caz cu formula este setat la cartografiere, care traduce punctul de arbitrar m (x, y) până la punctul M * (x *, Y *), ale căror coordonate sunt definită în același sistem de coordonate. În viitor, vom interpreta formulele, de regulă, într-un anumit sistem de coordonate rectilinieri, punctele de avion sunt convertite.
În transformările afine ale avionului, mai multe cazuri speciale importante joacă un rol special care are caracteristici geometrice bine trasabile. În studiul semnificației geometrice a coeficienților numerici în formulele pentru aceste cazuri este convenabil să se presupună că sistemul de coordonate specificat este un cartesian dreptunghiular.
Cele mai frecvent aplică următoarele tehnici de grafică de calculator: transfer, scalare, rotire, reflecție. Expresii algebrice și desene care explică datele de conversie din tabelul 1.
Conversia afinelor în avion
Transferul este înțeles de compensarea primitivelor de ieșire pe același vector.
Scalarea este o creștere sau o scădere a întregii imagini sau a părții sale. Când scalarea, coordonatele punctelor de imagine sunt înmulțite cu un număr.
Sub întoarcere înseamnă rotirea primitivilor de ieșire în jurul axei specificate. (În planul de desen, rotația are loc în jurul punctului.)
Sub reflecție, se înțelege că obțineți o imagine a imaginii oglinzii față de una dintre axe (de exemplu x).
Alegerea acestor patru cazuri speciale este determinată de două circumstanțe:
1. Fiecare dintre transformările de mai sus are un sens geometric simplu și vizual (înțelesul geometric este dotat cu numere constante incluse în formule).
2. După cum sa dovedit în cursul geometriei analitice, orice conversie a tipului (*) poate fi întotdeauna reprezentată ca o versiune secvențială (superpoziție) a celor mai simple transformări ale speciilor A, B, B și G (sau părți ale acestora transformări).
Astfel, următoarea proprietate importantă a transformărilor afine plane sunt valide: orice afișare a formei (*) poate fi descrisă utilizând cartografiere definită prin formule A, B, B și G.
Pentru a utiliza în mod eficient aceste formule bine cunoscute în sarcini grafice de calculator, înregistrarea de matrice este mai convenabilă.
Sunt introduse coordonate uniforme pentru a combina aceste transformări. Coordonatele uniforme ale punctului numite orice triplu, în același timp, nu egale cu numerele zero x1, x2, x3 asociate cu numerele specificate x și y cu următoarele rapoarte:
Apoi, punctul M (x, Y) este înregistrat ca m (HX, HY, H), unde H 0 este un factor de scară largă. Coordonatele carteziene bidimensionale pot fi găsite ca
În geometria proiectivă, aceste coordonate sunt introduse pentru a elimina incertitudinile care decurg din sarcina de elemente infinit (interne). Coordonatele omogene pot fi interpretate ca atașament al unui plan scalat cu coeficientul H în planul Z \u003d H în spațiul tridimensional.
Punctele din coordonatele omogene sunt înregistrate prin șiruri vectoriale cu trei elemente. Matricele de conversie trebuie să fie dimensiunea 3x3.
Cu ajutorul triplelor coordonatelor omogene și a matricelor din a treia ordine, poate fi descrisă orice transformare plană afină.
De fapt, numărarea H \u003d 1, comparați două intrări: un simbol marcat (*) și următoarele, Matrix:
Acum puteți utiliza compozițiile de conversie, aplicând unul rezultat în locul unei serii de transformări care se urmăresc reciproc. Puteți, de exemplu, o sarcină complexă să se împartă într-un rând simplu. Rotiți punctul și în apropierea unui punct arbitrar în pot fi împărțite în trei sarcini:
transferul la care b \u003d 0 (în cazul în care coordonatele 0-început);
Turn;
Transfer invers, în care punctul de întoarcere la locul și așa mai departe.
Compoziția celor mai frecvente tipuri de operații T, D, R, M are o matrice:
Partea superioară a dimensiunii de 2x2 este matricea combinată de rotație și scalare, un TX și TY descriu transferul total.
Următoarele sunt după cum urmează:
scrolling.mutarea ferestrei de pe suprafața de vizualizare (dacă mișcarea este limitată numai de direcțiile în sus și în jos, atunci se numește defilare verticală);
transfocarea schimbare treptată a scării imaginii;
rostogoli Imaginea dinamică a primitivilor de ieșire care se rotește în jurul unei axe, orientarea cărora se schimbă continuu în spațiu;
tigaie Transferul treptat al imaginii pentru a crea o senzație vizuală de mișcare.
Capitolul I.Phone de transformare geometrică
1.1 Ce este o transformare geometrică?
Simetria axială, simetria centrală, rotirea, transferul paralel, homotezia au ceva în comun că toți "convertesc" fiecare figură fb unele nouă Figura F1. Prin urmare, ele sunt numite transformări geometrice.
În general, transformarea geometrică se numește orice regulă care permite fiecărui punct A din plan să specifice un nou punct A "în care punctul și transformarea luată în considerare este transformat. Dacă orice figură f este dată în avion, atunci Setul de toate punctele în care figurile fine sunt transmise Conversia în cauză este o nouă figură F., în acest caz, se spune că F "este obținut de la F folosind conversia în cauză.
Exemplu. Simetria relativă la Direct L este o conversie geometrică. Regula care vă permite să găsiți punctul corespunzător A la punctul A, în acest caz, acesta constă în următoarele: Din punctul A, Perpendicularul AR este redus direct pe continuarea acestuia pe punct P este amânat cu un segment din ra "\u003d AR.
Adăugarea transformărilor geometrice
Să presupunem că luăm în considerare două transformări geometrice, dintre care unul se numește "primul", iar celălalt este "al doilea". Luați un punct de vedere arbitrar în planul A și denotați de un "un punct în care merge la prima conversie. La rândul său, punctul A este tradus de a doua transformare într-un punct nou A." Cu alte cuvinte, punctul A "este obținut din punctul A cu utilizarea secvențială a două transformări este mai întâi primul și apoi al doilea.
Rezultatul executării secvențiale a celor două transformări anterioare este, de asemenea, o conversie geometrică: transferă punctul A până la punctul A ". Această transformare" rezultată "se numește suma primului și a doua transformări luate în considerare.
Să presupunem în plan orice figură F este dată în avion. Prima transformare se traduce într-o figură f ". A doua transformare a acestei figuri f" este tradusă într-o nouă figură f ". Suma primului și a doua transformări traduce imediat figura FB Fig Fig ".
Exemplu. Fie ca prima transformare să fie o simetrie față de punctul O1 și cea de-a doua transformare - simetrie față de un alt punct O2. Găsiți suma acestor două transformări.
Fie ca un punct arbitrar al avionului. Să presupunem că primul punct A nu se află pe O1O2 direct. Denotă printr-un punct de punct, simetric A relativ la O1, și printr-un punct simetric "în raport cu O2. Deoarece O1O2 - linia de mijloc a triunghiului AA" A "" atunci secțiunea AA "este paralelă la segmentul O1O2 și are de două ori mai mult. Direcția de la punctul A la punctul A "coincide cu direcția de la punct
O1 până la O2. Acum denotăm vectorul MNTACK că tăieturile MNO O1 O2 sunt paralele, segmentul MNV este de două ori mai mare decât segmentul O1O2 și razele de Mn O1O2 au aceeași direcție. Apoi AA "\u003d Mn, adică punctul A" este obținut din punct și prin transfer paralel la vectorul Mn.Același lucru este valabil și pentru un punct situat pe o O1O2 direct.
În cele din urmă, obținem: suma simetriei față de punctul de O1 și simetria față de punctul O2 este paralelă, transfer.
1.2 Mișcarea
Simetria axială, rotația (în special, simetria centrală) și transferul paralel au ceva în comun că fiecare dintre aceste transformări se traduce orice figură f pe plan la figura F egală cu ea. "Transformările care au această proprietate sunt numite mișcări . Homethetics este un exemplu de conversie care nu se mișcă. Într-adevăr, fiecare mișcare se traduce orice figură la figură egală cu ea, adică doar poziția figurilor asupra planului, se schimbă homotezia și dimensiunile cifrelor.
Rolul mișcărilor în geometrie
Mută \u200b\u200bjocul în geometrie rolul extrem de important. Ei nu schimbă nici forme, nici dimensiuni ale cifrelor, schimbând doar locația figurii. Dar cifrele care diferă numai pe locația lor în avion, din punctul de vedere al geometriei, sunt exact aceleași. De aceea sunt chemați în geometrie "figuri egale". Nici o proprietate a figurii geometrice diferă de proprietatea corespunzătoare a cifrei egală cu aceasta. De exemplu, triunghiurile egale nu au și aceleași părți, ci și aceleași unghiuri, medii, bisector, pătrat, înscrise și descrise cercuri și așa mai departe.
În lecțiile de geometrie, am considerat întotdeauna figuri egale (adică, cum pot fi combinate cu mișcarea) sunt identice sau indistinguizabile. Astfel de cifre sunt adesea luate pentru aceeași figură. De aceea putem spune că, de exemplu, sarcina de a construi un triunghi pe două părți a, care a concluzionat între ele colțul C are o singură soluție. De fapt, desigur, triunghiurile având datele părților A și B și colțul dintre ele între ele pot fi găsite în mod intern foarte mult. Cu toate acestea, toate aceste triunghiuri sunt aceleași egale, astfel încât acestea pot fi luate pentru triunghi "unul".
Astfel, geometria studiază acele proprietăți ale figurilor care sunt aceleași în forme egale. Astfel de proprietăți pot fi numite "Proprietăți geometrice". Cu alte cuvinte: Geometria studiază proprietățile figurilor care nu depind de locația lor. Dar cifrele care diferă numai în locație (figuri egale) sunt cele care pot fi combinate cu ajutorul mișcării. Prin urmare, ajungem la următoarea definiție a obiectului de geometrie; Geometria studiază acele proprietăți ale figurilor stocate la conducere.
Traficul în geometrie și fizică
Deci, conceptul de mișcare joacă un rol primar în geometrie. Mișcările ("suprapunerile") au fost utilizate în clasa VI pentru a determina cifrele egale, pentru a dovedi semne de egalitate de triunghiuri; Conceptul de mișcare, după cum am văzut mai sus, face posibilă, de asemenea, o descriere a obiectului de geometrie.
Între timp, în definițiile conceptului de egalitate de cifre și conceptul de mișcare există un spațiu. De fapt, au fost determinate cifre egale (în clasa VI) ca astfel de cifre care pot fi combinate cu impunerea (adică mișcarea). Mișcările au fost definite mai sus ca astfel de transformări care traduc doi poligoni F1 și FTACKS că există un poligon f ", un FF homotetic este egal cu F1, apoi unghiurile poligonului sunt compalcial egale cu unghiurile poligonului F" petreceri ale poligonului poligonului, proporțional cu părțile laterale ale poligonului f ". Dar poligonul F aceleași colțuri și petreceri ca poligon egal F1. În consecință, poligoanele F1i F sunt similare în sens, în care a înțeles în curs din geometria clasei VIII.
Înapoi, lăsați poligoanele F1 și F să fie astfel încât unghiurile lor să fie, respectiv, egale, iar părțile sunt proporționale. Raportul părților de poligon f1 la laturile corespunzătoare ale poligonului va fi găsit de K. Mai departe, denotată de F "Poligonul, rezultând din fgomotey cu coeficientul K (și cât de mult de centrul homotezei. În acest caz, în virtutea teoremei poligoanelor F" și F1 va avea respectiv partea egală Și unghiurile, adică acești poligoane vor fi egali. Prin urmare, poligoanele F1 și decolorate sunt similare în sensul asemănării similitudinii dat aici.
Capitolul II.AFAFFINE Transformare
2.1 Conversia planului Afine
Transformarea Afină α se numește o astfel de conversie a avionului, care tot felul de direcții se traduce direct și păstrează relația în care punctul împarte segmentul.
Figura 1: L "\u003d α (L), a" \u003d a (A), B "\u003d a (b), c" \u003d α (c),
|Transformări - mișcare și similitudine - sunt cazuri speciale de afină, deoarece datorită proprietăților mișcării și asemănării acestora sunt toate cerințele pentru determinarea transformărilor afine.
Dăm un exemplu de transformare afină care nu reducă anterior. În acest scop, luați în considerare mai întâi designul paralel al avionului în avion.
Lăsați planul: W și W1 drept l (direcția designului), nu paralel cu oricare dintre aceste avioane (figura 2). Punctul Aєw este numit proiecția punctului A1W1, dacă AA || L, atunci direct AA1 este numit linia de proiectare. Designul paralel este afișarea avionului W1 pe W.
Rețineți următoarele proprietăți ale designului paralel.
1) Calea cu orice a1 dreaptă este dreaptă.
De fapt, linia dreaptă, punctele de design ale A1 drepte formează un plan (trece prin A1 paralel cu L), care, la trecerea, imaginea directă A1 este dreaptă a (figura 2).
2) Atitudinea în care punctul împarte segmentul este conservat, adică
(Fig.2)Urmează imediat din teorema intersecției laterale a unghiului cu paralel drept.
Ne întoarcem direct la construirea unui exemplu de conversie afină.
Luați două cazuri ale avionului W și unul dintre ele se va muta într-o altă poziție W1 (figura 3). Noua poziție a oricărui punct este A.W-Substitution A1єw1. Acum, avionul W1 proiectăm într-o anumită poziție pe W, proiecția punctului A1 este notată de ".
Sa dovedit transformarea avionului W, în care
. În virtutea proprietăților simetrice ale designului paralel pentru această transformare, ambele cerințe ale unei anumite conversii afse sunt efectuate, prin urmare, se construiește acum convertirea convertirii și on-a-proeminentă.Tema acestei chestiuni este sarcina conversiei afine în forma matricei. Acest subiect este în esență o generalizare a tot ceea ce sa spus mai devreme.
Definiție. Transformarea planului este numită afinitate, în cazul în care un
- este cu siguranță cu siguranță;
- modul în care orice drept este drept.
Se numește transformare reciproc fără echivocat, în cazul în care un
- punctele diferite se deplasează la diferite;
- unele puncte intră în fiecare punct.
Coordonate uniforme
Dacă luăm în considerare transferul paralel, se pare că matricea matricei 2x2 nu este deja suficientă. Dar poate fi setat folosind matricea de dimensiune 3x3. Întrebarea apare în cazul în care să se ia a treia coordonate la un punct bidimensional?
Definiție. Coordonate uniforme - Coordonatele care au proprietatea pe care obiectul le-a definit de ele nu se schimbă atunci când se înmulțește toate coordonatele per și același număr.
Coordonatele omogene ale vectorului(X y) este partea de sus a numerelor(x ", y", h), unde x \u003d x "/ h, y \u003d y" / h și h - un număr real (caz cândh \u003d 0. este special).
Aproximativ.Aceste coordonate nu permit să se stabilească fără echivoc punctul de vedere al planului. De exemplu,(1, 1, 1) și (2, 2, 2) Specificați același punct(1, 1) . Se propune să se facă un set(x, y, 1) care va descrie toate punctele avionului.
Matricea de conversie pentru coordonate omogene este de 3x3. Luați în considerare unele transformări în coordonate omogene.
Compresie / întindere
Această transformare multiplică coordonatele corespunzătoare ale punctelor la coeficienții de scalare de către axe:(x, y) -\u003e (a x * x, a y * y) . Matricea de conversie este înregistrată după cum urmează:
[A x 0 0]
Unde un X. - întinderea de-axeix
aY. - întinderea de-axeiy.
Aproximativ. Se poate observa că, cu valorile negative ale coeficienților de compresie / întindere, există o reflectare a axelor relativ adecvate. Acest caz poate fi inclus în această transformare și poate fi luat într-un separat, spunând că coeficienții de scalare iau numai valori pozitive.
Turn

Matricea de twist 2x2 a fost dezmembrată în detaliu mai devreme. Acum este completat de un șir și o coloană:
[-SIN (PHI) COS (PHI) 0]
Aproximativ.La colțul lui Phi \u003d n Această matrice stabilește o simetrie centrală față de începerea coordonatelor, care este un caz special de rotație. Se poate observa că o astfel de simetrie poate fi setată prin transformarea compresiei / întinderii (aderării coeficienților de scalare negativi).
Transfer paralel
![]()
Vectorul original (x, y) trece la (x + t x, y + t y) . Matricea de conversie este înregistrată după cum urmează:
[ 1 0 0]
[T x t y 1]
Reflecţie

După cum se menționează într-o notă pentru a transforma compresia / întinderea, reflecțiile sunt obținute după cum urmează:
[-10 0]
reflecție cu privire la axa x
reflecție pe axăy.
Vedere generală a conversiei afine
Matrix 3x3, ultima coloană a cărei este (0 0 1) t, stabilește conversia afină a planului:
[ * * 0]
[ * * 0]
[ * * 1]
Una dintre proprietăți, o conversie afină poate fi scrisă ca:
f (x) \u003d x * r + t,
unde r. - matrice reversibilă 2x2, și t - Vector arbitrar. În coordonatele omogene, acest lucru este scris după cum urmează:
[R 1,1 R 1,2 0]
[R2,1 R 2.2 0]
[T x t y 1]
Dacă înmulțiți șirul vectorial pe această matrice, obținem rezultatul conversiei:
[XY1] * [R 1.1 R 1,2 0]
[R2,1 R 2.2 0]
[T x t y 1]
[X'Y'1] + [t x t y 1]
În același timp [x 'y'] \u003d r * [x y]
Aproximativ. Cititorul curios sa întrebat deja întrebarea: Care este semnificația determinantului matricei r? Cu conversia afinității a zonei tuturor formelor variază în |R. |. (Puteți dovedi cu strictețe din punctul de vedere al matematicii, dar aici acest fapt este dat fără dovadă.)
Asa de Transformarea afinelor este reprezentată ca o compoziție a unei conversii specificate de matriceR. , și transferul paralel. Vom analiza în detaliu natura acestei matrice și posibilitatea ca noi să ne dăruiească.
Matrix R. Determină noua bază plană. Acestea. vector(1, 0) trece la (R1,1, R 1,2), vector (0, 1) trece la (R2,1, R 2,2 ). Noua bază este șirurile de matriceR.
Exemplu.

Când se reflectă în raport cu axa Y , vectorul de bază de-a lungul axei ordonate este păstrat și axa Abscisa intră în(-10). Asa de Matrix R. Va arăta așa:
Acum devine clar că, în plus față de transformările de mai sus, este posibil să se obțină un SCO cu o transformare afină:

Cele de mai sus sunt informațiile de bază despre un instrument atât de puternic ca o transformare afină. Există multe întrebări: ce subclasă de conversie subcină salvează colțurile între drepte? Cum îmi pot imagina o transformare afină sub forma unei compoziții a mai multor subclase? Cum se stabilește transformări mai complexe, de exemplu, simetria axială în raport cu arbitrar drept?
Răspunsurile la aceste întrebări și o analiză mai detaliată a transformării afine va fi prezentată separat, ca o secțiune a cursului de geometrie teoretică.
Să trăim pe implementarea practică a transformării afine sub forma unui program demo. Capacitățile aplicației care arată rotirea planului cu mouse-ul se adaugă funcții de transfer paralel atunci când cheia este apăsatăCtrl.
pentru că Acest articol finalizează în această secțiune, codul cererii demo trebuie să fie adecvat. Să încercăm să ne dăm seama ce blocuri sunt necesare în aplicația grafică, în paralel, având în vedere modul în care sunt implementate în acest program:
- un bloc în care creează fereastra și mesajele sistemului de operare sunt procesate, implementate în fișieremain. CPP.
- motorul grafic Efectuarea desenului imaginii, clasaMotor
- stratul necesar pentru a converti coordonatele logice la fereastră și spate, clasăViewport.
- obiect responsabil pentru reacția la acțiunile utilizatorilor, clasaAcțiune.
În exemplul de mai sus, aceste blocuri funcționale sunt implementate, cu comentarii detaliate.
Sub \\ (F \\) denotă o conversie afină înregistrată în sistemul de coordonate carteziene \\ (O, \\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2) \\) formule
$$
x ^ (*) \u003d a_ (1) x + b_ (1) y + c_ (1), \\ y ^ (*) \u003d a_ (2) x + b_ (2) y + c_ (2). \\ etichetă ( Ref1)
$$
dat fiind
$$
\\ Începe (VMATRIX)
A_ (1) & b_ (1) \\\\
A_ (2) & b_ (2)
\\ Capăt (vmatrix) \\ neq 0. \\ etichetă (REF2)
$$
Luați în considerare linia directă din avion cu ecuația \\ (\\ boldsymbol (r) \u003d \\ boldsymbol (R) _ (0) + \\ \\ boldsymbol (a) t \\) și vom găsi imaginea la conversie \\ (F \\) . (Sub cuplu este o mulțime de imagini ale punctelor sale.) Imaginea de radius-vector \\ (M ^ (* (*) \\) Un punct arbitrar \\ (m \\) poate fi calculat după cum urmează:
$$
\\ preagridarrow (^ (*)) \u003d \\ preagrigharrow (de (O)) + F \\ Overryarrow ((O) M ^ (*)) \u003d \\ boldsymbol (C) + F (\\ boldsymbol (R)). \\ Nonumber
$$
Aici \\ (\\ boldsymbol (c) \\) este un vector permanent \\ (\\ overrightarrow (de) (O) \\), și \\ (\\ boldsymbol (r) \\) este un punct de radius-vector \\ (m \\). Conform (11) §2
$$
\\ OMPRITARROW (OM ^ (* (*)) \u003d \\ boldsymbol (C) + F (\\ boldsymbol (R) _ (0)) + F (\\ boldsymbol (a)) T. \\ Etichetă (REF3)
$$
Deoarece \\ (F \\) este o conversie afină și \\ (\\ boldsymbol (a) \\ neq \\ boldsymbol (0) \\), atunci \\ (\\ boldsymbol (a) \\) va intra în vector \\ (F (\\ boldsymbol ( A)) \\ neq 0 \\), iar ecuația \\ eqref (REF3) este o ecuație liniară dreaptă. Deci, imaginile tuturor punctelor sunt drepte \\ (\\ boldsymbol (r) \u003d \\ boldsymbol (R) _ (0) + \\ boldsymbol (a) t \\) se află pe linia dreaptă \\ eqref (REF3).
Mai mult, transformarea \\ (F \\) definește o cartografiere reciprocă de unic de unul direct la altul, deoarece atunci când selectarea punctelor inițiale și a vectorilor de ghidare realizată aici, punctul \\ (m ^ (* (*) \\) are aceeași valoare pe Direct \\ eqref (REF3) parametrul \\ (t \\), ca punct \\ (m \\) de pe originalul direct. De aici primim prima declarație.
Approval 1.
Cu conversia afinității:
- linia dreaptă merge într-o linie dreaptă;
- tăierea trece în segment;
- tranziție directă paralelă la paralel.
Dovezi.
Pentru a dovedi a doua aprobare, este suficient să se observe că lungimea liniei constă în astfel de puncte în care valorile parametrului satisfac inegalitatea formei \\ (T_ (1) \\ leq t \\ leq t_ (2 ) Cea de-a treia aprobare rezultă din faptul că atunci când transformarea afinelor colinear urmează vectorii intră în colinear.
Approval 2.
Într-o transformare afină, raportul dintre lungimile segmentelor paralele nu se schimbă.
Dovezi.
Lăsați segmentele \\ (ab \\) și \\ (CD \\) să fie paralele. Aceasta înseamnă că există un astfel de număr \\ (\\ lambda \\) care \\ (\\ ceargharrow (AB) \u003d \\ lambda \\ overrightarrow (CD) \\). Imaginile vectorilor \\ (\\ overrightarrow (AB) \\) și \\ (CD) \\ (CD) \\) sunt asociate cu aceeași dependență \\ (A ^ (* (* (*) b ^ (*)) \u003d \\ lambda \\ preagrigharrow ( C ^ (*) d ^ (*)) \\). De aici rezultă asta
$$
\\ Frac (| \\ overrightarrow (AB) |) (| \\ overrightarrow (CD) |) \u003d \\ frac (| \\ engrightarrow (A ^ (* (*) b ^ (*))) (| \\ overryarrow (c ^ (* (* (* (* ) D ^ (*)) |) \u003d | \\ lambda |. \\ Nonumber
$$
Corolar.
Dacă punctul \\ (C \\) împarte segmentul \\ (ab \\) într-un anumit respect \\ (\\ lambda \\), atunci imaginea sa \\ (C ^ (* (*) \\) împarte imaginea \\ (A ^ (*) B ^ (*) \\) Tăiat \\ (ab \\) în același raport \\ (\\ lambda \\).
Schimbarea zonelor pentru transformarea afinelor.
Pentru a începe cu, ia în considerare. Alegeți un sistem comun de coordonate cartezian \\ (O, \\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2) \\) și denotă cu \\ ((1), p_ (2)) \\) și \\ ((Q_ (1), q_ (2)) \\) Componentele vectorilor \\ (\\ boldsymbol (p) \\) și \\ (\\ boldsymbol (q) \\) pe care este construit. Paralelogramă pătrat putem calcula folosind:
$$
S _ (\\ pm) (\\ pm) (\\ boldsymbol (p), \\ boldsymbol (q)) \u003d (p_ (1) q_ (2) -p_ (2) q_ (1)) s _ (\\ pm) (\\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2)). \\ nonumber
$$
Lăsați o transformare afină \\ (F \\) înregistrată în sistemul de coordonate selectat prin formule \\ eqref (REF1). De la demonstrația anterior rezultă că vectorii \\ (F (\\ boldsymbol (P)) \\ (\\ boldsymbol (q)) \\ (F (\\ boldsymbol (e) _ (1 ), f (\\ boldsymbol (e) _ (2)) \\) aceleași componente \\ ((1), p_ (2)) și \\ ((q_ (1), q_ (2)) \\ ) că și vectorii \\ (\\ boldsymbol (\\ boldsymbol (q) \\) în temeiul \\ (\\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2) \\). Imaginea paralelogramei este construită în vectori \\ (F (\\ Boldsymbol (P)) \\) și \\ (\\ boldsymbol (q)) \\ (Q)) și zona sa este egală
$$
S _ (\\ pm) ^ (*) \u003d s _ (\\ pm) (F (\\ boldsymbol (P)), F (\\ boldsymbol (q))) \u003d (P_ (1) Q_ (2) -P_ (2 ) q_ (1)) S _ (\\ pm) (F (\\ boldsymbol (e) _ (1)), f (\\ boldsymbol (e) _ (2))). \\ nonumber
$$
Calculați ultimul factor. După cum știm din anii deja dovediți, coordonatele vectorilor \\ (F (e) _ (1)), F (\\ boldsymbol (e) _ (2)) sunt egale, respectiv (( A_ (1), a_ (2)) \\) și \\ ((b_ (1), b_ (2)) \\). Prin urmare, \\ (s _ (\\ pm) (F (\\ boldsymbol (e) _ (1)), f (\\ boldsymbol (e) _ (2))) \u003d (a_ (1) b_ (2) -a_ ( 2) b_ (1)) s _ (\\ pm) (\\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2)) \\) și
$$
S _ (\\ pm) ^ (*) \u003d (p_ (1) q_ (2) -p_ (2) q_ (1)) (a_ (1) b_ (2) -a_ (2) b_ (1)) s_ (\\ pm) (\\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2)). \\ nonumber
$$
De aici vedem asta
$$
\\ Frac (s _ (_ pm) ^ (*)) (s _ (\\ pm)) \u003d \\ început (VMATRIX)
A_ (1) & b_ (1) \\\\
A_ (2) & b_ (2)
\\ Capăt (vmatrix). \\ Etichetă (REF4)
$$
Astfel, raportul dintre zona de referință a unui paralelogram orientat în zona acestei paralelograme este aceeași pentru toate paraleleogramele și este egală cu \\ (A_ (1) B_ (2) -A_ (2) B_ (1 ) \\).
Rezultă că acest determinant nu depinde de alegerea sistemului de coordonate în care este înregistrată transformarea, deși este calculată prin coeficienți în funcție de sistemul de coordonate. Această valoare este o invariantă care exprimă proprietățile geometrice ale transformării.
Din formula \\ eqref (REF4) se poate observa că atitudinea unei imagini a unui paralelogram neornuit în zona sa este egală
$$
S ^ (*) / s \u003d | a_ (1) b_ (2) -a_ (2) b_ (1) |. \\ Etichetă (REF5)
$$
Dacă \\ (A_ (1) b_ (2) -a_ (2) b_ (1)\u003e 0 \\), atunci orientarea tuturor paralelogramelor orientate sunt stocate la conversia și dacă \\ (1) b_ (2) - A_ (2) B_ (1)< 0\), то для каждого ориентированного параллелограмма ориентация образа противоположна его ориентации.
Acum ne vom ocupa de pătratele altor figuri. Fiecare triunghi poate fi suplimentat la paralelogram, din care este egală cu zona dublă a triunghiului. Prin urmare, raportul dintre zona imaginii triunghiului în zona acestui triunghi satisface egalitatea \\ eqref (REF5).
Fiecare poligon poate fi rupt în triunghiuri. În consecință, Formula \\ EQREF (REF5) este valabil și pentru poligoane arbitrare.
Nu vom atinge definiția unei zone a unei figuri curbilineare arbitrare. Să spunem doar că, în cazurile în care acest domeniu este definit, este egal cu limita zonei unor secvențe de poligoane, înscrise în figura în cauză. Următoarea ipoteză este cunoscută din teoria limită: dacă secvența \\ (S_ (n) \\) tinde să limiteze \\ (S \\), atunci secvența \\ (\\ deelta s_ (n) \\), unde \\ (\\ Deelta \\ ) este constantă, încercând pentru limită \\ (\\ delta s \\). Pe baza acestei propuneri, concluzionăm că formula \\ eqref (REF5) este valabilă în cazul general.
De exemplu, vom găsi expresia zonei elipse prin semi-axa sa. Anterior, noi, că elipsa cu semi-axele \\ (A \\) și \\ (B \\) pot fi obținute prin comprimarea cercului razei \\ (A \\) la trecerea directă prin centrul său. Coeficientul de compresie este \\ (b / a \\). Într-unul din noi am primit o înregistrare de compresie de coordonate la o linie dreaptă \\ (x ^ (*) \u003d x \\), \\ (y ^ (* (*) \u003d \\ lambda y \\). Determinantul coeficienților din aceste formule este \\ (\\ lambda \\), adică în cazul nostru \\ (b / a \\). Astfel, raportul dintre pătratul elipzului în zona cercului este egal cu \\ (b / a \\), iar această zonă este egală cu \\ (S \u003d (B / A) \\ pi ^ (2) \\ ). În cele din urmă
$$
S \u003d \\ pi ab. \\ Nonumber
$$
Linii de ordine secundare.
Am văzut că linia dreaptă merge direct. Acesta este un caz special al următoarei declarații.
Approval 3.
Transformarea afinelor traduce o linie algebrică într-o linie algebrică de aceeași ordine.
Dovezi.
De fapt, lăsați linia \\ (L \\) în sistemul de coordonate carteziene \\ (O, \\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2) \\) are o ecuație algebrică de ordine \\ (P \\). Deja, imaginile tuturor punctelor de linie \\ (L \\) cu transformare afină \\ (F \\) au în sistemul de coordonate \\ (F (O), F (\\ Boldsymbol (e) _ (1)), f (\\ Boldsymbol (e) _ (2)) \\) aceleași coordonate ca și prototipurile lor în sistemul de coordonate \\ (O, \\ boldsymbol (e) _ (1), \\ boldsymbol (e) _ (2) \\). Prin urmare, coordonatele de imagini din sistem \\ (f (0), F (\\ boldsymbol (e) _ (1)), f (\\ boldsymbol (e) _ (2)) sunt conectate prin aceeași ecuație algebrică de ordine \\ (P \\). Acest lucru este suficient pentru a face concluzia de care avem nevoie.
Din aprobarea de mai sus, în special, rezultă că a doua linie de comandă în timpul transformării afinității va fi transferată la linia de ordinul a doua. Vom dovedi o declarație mai puternică. După cum știm deja, liniile de ordinul doi pot fi împărțite în. Vom vedea că clasa de clasă este salvată cu conversia afinității. Pe această bază, clasele de linii enumerate în teorema specificată sunt numite clase de afinitate. Deci, vom dovedi o nouă declarație.
Approval 4.
Cea de-a doua linie de ordine aparținând uneia dintre clasele afine, cu orice transformare afină, poate merge doar la linia de aceeași clasă. Fiecare linie de ordine a doua cu o conversie afină adecvată poate fi tradusă în orice altă linie a aceleiași clase de afine.
Dovezi.
Noi numim linia limitată dacă se află în interiorul unei anumite paralelograme. Este ușor de văzut că în timpul transformării afinității, linia limitată trebuie să meargă la limitată și nelimitată - în nelimitat.
- Ellipse este o linie limitată de ordine a doua. În plus față de elipse, numai liniile formate dintr-un punct sunt limitate, adică câteva linii drepte intersectate imaginare. Deoarece elipsa este limitată și constă mai mult decât de la un punct, acesta poate merge doar la elipsă.
- Hyperbolul este alcătuit din două ramuri separate. Această proprietate poate fi formulată astfel încât imuabilitatea sa în transformările afine să fie clară. Este, există o linie dreaptă care nu traversează hiperbola, ci trecerea o parte din acordurile sale. Din toate liniile de ordinul doi, numai hiperbele și liniile paralele au această proprietate. Ramurile hiperbolice nu sunt linii drepte și, prin urmare, cu transformarea afinității, poate merge doar la Hyperbola.
- Parabola este o linie nelimitată a ordinii a doua, constând dintr-o piesă indirectă. Nicio altă linie a celei de-a doua ordine nu posedă această proprietate și, prin urmare, parabola poate merge doar la parabola.
- Dacă linia de ordine a doua este un punct (o pereche de linii drepte imaginare), directe (pereche de coincid direct), o pereche de intersecție sau pereche de linii drepte paralele, apoi din proprietățile dovedite anterior ale transformărilor afine rezultă că aceasta linia nu poate merge la linia de altă clasă.
Doveim a doua parte a propunerii. În același-dovedit, ecuațiile canonice ale liniilor de ordine secundară au fost scrise în sistemul de coordonate dreptunghiulare cartesian și conțin parametrii \\ (A, B, ... \\) Dacă renunțăm la ortonormitia de bază, putem continua Simplificați ecuațiile canonice și aduceți-le în minte care nu conține parametri. De exemplu, înlocuirea coordonatelor \\ (x '\u003d x / a \\), \\ (y' \u003d y / b \\) traduce ecuația elipsei \\ (x ^ (2) a ^ (2) + y ^ ( 2) B ^ (2) \u003d 1 \\) la ecuația \\ (x '^ (2) + y' ^ (2) \u003d 1 \\), ce ar fi \\ (a \\) și \\ (b \\). (Ultima ecuație nu este o ecuație a cercului, deoarece noul sistem de coordonate nu este un dreptunghiular decartan.)
Cititorul poate arăta cu ușurință că ecuațiile canonice ale liniilor de ordine secundară prin trecerea la un sistem adecvat de coordonate pot fi convertite în ecuații:
- \\ (x ^ (2) + y ^ (2) \u003d 1 \\);
- \\ (x ^ (2) + y ^ (2) \u003d 0 \\);
- \\ (x ^ (2) -y ^ (2) \u003d 1 \\);
- \\ (x ^ (2) -y ^ (2) \u003d 0 \\);
- \\ (y ^ (2) \u003d 2x \\);
- \\ (Y ^ (2) -1 \u003d 0 \\);
- \\ (y ^ (2) \u003d 0 \\).
Un astfel de sistem de coordonate pe care îl numim sistemul de coordonate canonice de afinitate.
De la anterior rezultă că o conversie afină care combină sistemele de coordonate canonice afine de două linii de o clasă afină, combină aceste linii. Aceasta termină dovada.
Degradarea transformării ortogonale.
Teorema 1.
Fiecare transformare ortogonală este pliată în produsul transportului paralel, rotirea și, eventual, simetria axială.
Dovezi.
Permiteți \\ (F \\) să fie o transformare ortogonală și \\ (\\ vartriarngle ABC \\) - un triunghi rectangular rapid, cu un unghi drept \\ (A \\). La conversia \\ (F \\), va merge la triunghi egal cu \\ (\\ vartriarn a ^ (*) b ^ (*) cu un unghi direct la partea de sus \\ (A ^ ( *) \\). Teorema va fi dovedită dacă, producând un transfer paralel secvențial \\ (P \\), strunjire \\ (Q \\) și (dacă este necesar) axial \\ (r \\), putem combina triunghiurile \\ (ABC \\) și \\ (a ^ (*) B ^ (*) c ^ (*) \\). Într-adevăr, lucrarea \\ (RQP \\) este o transformare afină, precum și \\ (F \\), iar transformarea afină este determinată în mod unic de imaginile a trei puncte care nu se află pe o linie dreaptă. Prin urmare, \\ (RQP \\) coincide cu \\ (F \\).
Astfel, traducem \\ (A \\) și \\ (A ^ (*) \\) cu un transfer paralel \\ (P \\) la vector \\ (\\ engrightarrow (AA ^ (* (* (* (*)) \\) (dacă \\ (a \u003d A ^ (*) \\), atunci \\ (P \\) este o conversie identică). Apoi, întoarcerea \\ (Q \\) în jurul punctului \\ (A ^ (* (*) \\) este compatibil \\ (P (B) \\) C \\ (B ^ (*) \\ (eventual, iar această conversie va fi identică). Punctul \\ (Q (c)) \\) coincide cu \\ (c ^ (*) \\), fie este simetric cu el relativ drept \\ (A ^ (*) b ^ (*) \\). În primul caz, obiectivul a fost deja realizat, iar în cea de-a doua va lua simetria axială față de direcția directă specificată. Teorema este dovedită.
Ar trebui să se țină cont de faptul că descompunerea obținută a transformării ortogonale nu este cu siguranță. Mai mult, puteți transforma sau transfera paralel pentru a descompune într-o bucată de simetrii axiale, produsul de transfer paralel și rândul său, imaginați-vă ca o întoarcere și așa mai departe. Nu vom clarifica cum să facem acest lucru și să aflăm următoarea proprietate generală a tuturor acestor expansiuni.
Approval 5.
Cu orice descompunere a transformării ortogonale în produsul oricărui număr de transporturi paralele, rotiri și simetrii axiale, paritatea numărului de simetrii axiale incluse în descompunere este aceeași.
Dovezi.
Pentru dovadă, luați în considerare baza arbitrară a avionului și urmați schimbarea orientării sale (direcții celei mai scurte rotații de la \\ (\\ boldsymbol (e) _ (1) \\) la \\ (\\ boldsymbol (e) _ (2) \\ )) cu transformări efectuate. Rețineți că rotația și transferul paralel nu schimbă orientarea unei singure baze, iar simetria axială modifică orientarea oricărei baze. Prin urmare, dacă această transformare ortogonală modifică orientarea bazei, atunci în orice descompunere ar trebui să existe un număr impar de simetrii axiale. Dacă orientarea bazei nu se modifică, atunci numărul de simetrii axiale incluse în descompunere poate fi decât chiar.
Definiție.
Transformările ortogonale care pot fi descompuse în activitatea transferului paralel și sunt numiți transformări ortogonale ale primului fel , si restul - transformările ortogonale ale celui de-al doilea tip .
Conversia ortogonală în sistemul de coordonate dreptunghiulare carteziene este scris:
$$
\\ Începe (matrice) (cc)
\\ Capăt (matrice). \\ Nonumber
$$
Cu semnele superioare ale coeficienților în \\ (Y \\), în aceste formule, determinantul realizat din coeficienți este de +1 și la semnele de jos este -1. De aici și din formula \\ eqref (REF4) urmează următoarea afirmație.
Approval 6.
Transformarea ortogonală a primului tip este înregistrată în sistemul de coordonate dreptunghiulare cartesian prin formule
$$
\\ Începe (matrice) (cc)
& x ^ (*) \u003d x \\ cos \\ varfi \\ mp y \\ SIN \\ VARPHI + C_ (1), \\\\
& Y ^ (*) \u003d x \\ SIN \\ VARPHI \\ PM Y \\ COS \\ VARPHI + C_ (2).
\\ Capăt (matrice). \\ Nonumber
$$
Cu semne superioare în coeficienți cu \\ (Y \\) și transformarea ortogonală a celui de-al doilea tip - cu semne mai mici.
Descompunerea transformării afine.
Am văzut cât de mult o conversie afină poate schimba planul: un cerc poate merge la elipsă, triunghiul corect este complet arbitrar. Se pare că nici un fel de unghi nu pot fi păstrate. Cu toate acestea, are loc următoarea declarație
Approval 7.
Pentru fiecare transformare afină, există două directoare reciproc perpendiculare, care intră în linii drepte perpendiculare.
Dovezi.
Pentru dovadă, luați în considerare orice circumferință. Cu această transformare afină, va merge la elipsă. Fiecare axă a elipsei este un set de coardă gri, paralelă cu o altă axă. Cu transformarea afinității, coarda va merge la coardă, paralela va fi păstrată, iar mijlocul segmentului merge în mijlocul imaginii sale. Prin urmare, prototipurile axelor elipsei sunt segmente cu aceeași proprietate: fiecare dintre ele are o mulțime de circumferință de coardă din Sein paralel cu un alt segment. Astfel de segmente sunt cu siguranță două diametre reciproc perpendiculare ale cercului. Aceasta este ceea ce aveam nevoie: există două diametre reciproc perpendiculare ale cercului, care intră în segmente reciproc perpendiculare - axa elipsei.
Este demn de remarcat un caz special: un cerc cu transformare afină poate intra într-un cerc. În acest caz, același raționament trece cu orice două diametre reciproc perpendiculare ale imaginii cercului. Este evident că, în același timp, două direcții perpendiculare reciproc rămân perpendiculare.
Definiție.
Două direcții reciproc perpendiculare se numește direcțiile principale sau scufundate ale transformării afine \\ (F \\) dacă intră în direcții reciproc perpendiculare.
Teorema 2.
Fiecare transformare afină este pliată în produsul transformării ortogonale și două compresie la două directe reciproc perpendiculare.
Dovezi.
Dovada similar cu probele. Luați în considerare transformarea afinelor \\ (F \\) și alegeți un triunghi dreptunghiular egal \\ (ABC \\), astfel încât paturile sale \\ (ab \\) și \\ (AC \\) să fie direcționate de-a lungul direcțiilor principale ale transformării \\ (F \\) . Denotă de \\ (a ^ (* (*) \\), \\ (b ^ (* (*) \\) și \\ (c ^ (* (*) \\) imagini ale vârfurilor sale. Vom face o astfel de transformare ortogonală \\ (G \\), la care \\ (g (a) \u003d a ^ (*) \\) și punctele \\ (g (b) \\) și \\ (g (c) \\) se află pe raze \\ (A ^ (* (*) b ^ (*) \\) și \\ (A ^ (*) c ^ (*) \\). (Acest lucru este ușor de realizat, ca în Teorema 1, transferul paralel, rotația și simetria axială.)
Fie \\ (\\ lambda \u003d | a ^ (*) b ^ (*) | / | a ^ (*) g (b) | \\), a \\ (\\ mu \u003d | a ^ (*) c ^ (*) | / | A ^ (*) g (c) | \\). Apoi compresia \\ (P_ (1) \\) la linia \\ (A ^ (*) c ^ (*) \\) în legătură cu \\ (\\ lambda \\) traduce \\ (g (b) \\) în \\ (P_ ( 1) g (b) \u003d b ^ (*) \\) și nu schimbă puncte \\ (a ^ (*) \\) și \\ (g (c) \\). În mod similar, compresia \\ (p_ (2) \\) la drept \\ (A ^ (*) b ^ (*) \\) traduce \\ (g (c) \\) în \\ (P_ (2) g (c) \u003d c ^ (*) \\) și nu schimbă punctele drepte \\ (A ^ (*) b ^ (*) \\).
Aceasta înseamnă că produsul \\ (P_ (2) p_ (1) g \\) traduce punctele \\ (A \\), \\ (B \\) și \\ (C \\) la punctul \\ (A ^ (*) \\) , \\ (B ^ (* (*) \\) și \\ (c ^ (* (*) \\), precum și transformarea dată pentru noi \\ (F \\). Potrivit celor dovedite anterior, avem \\ (p_ (2) p_ (1) g \u003d f \\), după cum este necesar.
Orice conversie complexă afină poate fi reprezentată de o compoziție a mai multor conversii elementare afse. Analiza arată că în grafică 2D există patru conversii elementare afine - rândul său, întinderea, reflecția, transferul.
Turn.
Luați în considerare rotirea unui punct arbitrar. A.în jurul originii de la coordonate la unghi (figura 6).
Conversia elementară de conversie Afină - Unghiul de rotație .
Din geometria analitică, se știe că rândul este descris de următoarea transformare afină.
 (5)
(5)
Coordonate convenabil ale punctului de îmbinare sub forma unui vector 2-dimensional (coloană). Apoi trecerea punctului A.la poziția punctului A.
 (6)
(6)
În această notație, rândul poate fi exprimat sub formă de multiplicare matrice.
 (7)
(7)
Aici R.- Matrix de rotație (rotație - rotație). Structura acestei matrice este obținută din ecuații (5).
 (8)
(8)
Întinderea compresiei, scalarea.
Luați în considerare funcționarea compresiei de întindere de-a lungul axelor de coordonate cu coeficienți de întindere k. 1 ,k. 2. Adesea, această operație se numește scalare (scalare - scalare). De exemplu, arătăm (fig.7) segmentul de întindere cu coeficienți de întindere egali  .
.

Transformarea elementară afină - întinderea cu coeficienți  .
.
Stretching-ul este descris de următoarea conversie afină.
 (9)
(9)
Conversia (9) poate fi exprimată sub formă de multiplicare matrice.
 (10)
(10)
Aici S.- Matricea de scalare. Structura acestei matrice este obținută din ecuații (9).
 (11)
(11)
Reflecţie.
Luați în considerare operația de reflexie față de axele de coordonate. De exemplu, vom arăta (fig.8) reflecția față de axa x..
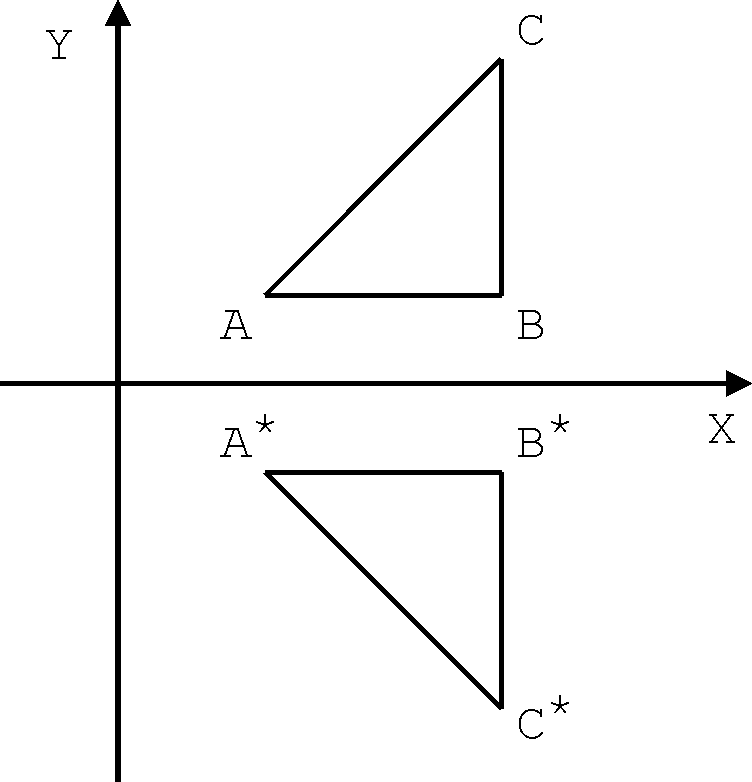
Conversia elementară a afinelor este o reflecție în raport cu axa de ox.
Reflecția este descrisă de următoarea conversie afină.
 (12)
(12)
Conversia (12) poate fi exprimată sub formă de multiplicare matrice.
 (13)
(13)
Aici M.- Matricea de reflexie (oglindă, reflecție). Structura acestei matrice este obținută din ecuații (12).
 (14)
(14)
În mod similar, găsim matricea de reflexie în raport cu axa y..
 (15)
(15)
Transfer.
Luați în considerare operațiunea de transmisie a transmisiei  . Cu această operație, orice obiect se mișcă fără distorsiuni, iar orice parte rămâne paralelă cu ea însăși. De exemplu, arătăm în Figura 9 transferul segmentului.
. Cu această operație, orice obiect se mișcă fără distorsiuni, iar orice parte rămâne paralelă cu ea însăși. De exemplu, arătăm în Figura 9 transferul segmentului.

Conversia elementară Afină - transfer vectorial de traducere t. .
Transferul este descris de următoarea conversie afină.
 (16)
(16)
Conversia (16) Dorim să exprimăm tipul sub formă de multiplicare a matricei.
 (17)
(17)
Aici T.- Trebuie să existe o matrice de traducere (translarat - radiodifuziune, transfer). Cu toate acestea, este imposibil să construim o matrice T.dimensiunea 22 astfel încât ecuațiile (16) și (17) sunt satisfăcute simultan.
Și totuși, o astfel de matrice poate fi creată dacă se gândește în mod oficial Afine 2D transformă în spațiul tridimensional. Pentru a face acest lucru, du-te la coordonate omogene.
Coordonate uniforme.
Conceptul de coordonate omogene a venit la noi din geometria proiectivă. Lăsați punctul A.se află în avion și are coordonate ( x.,y.). Atunci coordonatele omogeneacest punct este orice triplu de numere 1, x 2, x 3 asociate cu numerele specificate x.și y.următoarele rapoarte.
 (18)
(18)
La rezolvarea sarcinilor graficelor informatice ca coordonate omogene, sunt de obicei alese următoarele trei numere.
Astfel, un punct arbitrar A.(x.,y.) Avionul este pus în linie cu punctul A.(x.,y., 1) în spațiu. În esență, considerăm convertirea afacerilor în avion z.\u003d 1, după cum se arată în figura 10.

Transformarea afinelor în coordonate omogene.
Coordonatele punctelor care se află în avion z.\u003d 1 Combinăm sub formă de vectori tridimensionali. Punct de tranziție A.la poziția punctului A. * Poate fi reprezentat ca transformare a vectorilor.
 (20)
(20)
În această notație, transformarea globală a afinelor (1) poate fi exprimată ca o multiplicare matrice.
 (21)
(21)
Aici este matricea P.dimensiunea 33 este matricea unei conversii afine totale (1) și are forma.
 (22)
(22)
Observăm un punct important asociate cu coordonate omogene. Tranziția la vectori tridimensionali și matrice (20, 21, 22) ar putea fi efectuată complet formal, fără a se exprima spre spațiul tridimensional real (X, Y, Z). Această abordare permite transformările 3D-afine să introducă coordonate omogene și să producă multiplicații matrice într-un spațiu vectorial de 4-dimensională.
Matricele introduse mai devreme decât matricele transformărilor elementare afine, acum în coordonate omogene vor lua forma următoare.
Matricea se întoarce R.În coordonatele omogene vor avea următorul formular.
 (23)
(23)
Matrice de întindere S.se va schimba după cum urmează.
 (24)
(24)
Matricele de reflecție M.axele relativ coordonate vor fi vizualizate.
 (25)
(25)
Matrix Transfer. T.pe vectorul de difuzare  În coordonatele omogene vor avea următorul formular.
În coordonatele omogene vor avea următorul formular.
 (26)
(26)