Slough nedefinit. Sistem de ecuații
Un sistem de ecuații liniare este o unire de n ecuații liniare, fiecare conținând k variabile. Este scris astfel:
Mulți, când se confruntă pentru prima dată cu algebra superioară, cred în mod eronat că numărul de ecuații trebuie să coincidă în mod necesar cu numărul de variabile. În algebra școlară, acesta este de obicei cazul, dar pentru algebra superioară acest lucru nu este, în general, adevărat.
Rezolvarea unui sistem de ecuații este o succesiune de numere (k 1 , k 2 , ..., k n ), care este soluția fiecărei ecuații a sistemului, adică. când înlocuiți în această ecuație în loc de variabile x 1 , x 2 , ..., x n dă egalitatea numerică corectă.
În consecință, a rezolva un sistem de ecuații înseamnă a găsi mulțimea tuturor soluțiilor sale sau a demonstra că această mulțime este goală. Deoarece numărul de ecuații și numărul de necunoscute pot să nu fie același, sunt posibile trei cazuri:
- Sistemul este inconsecvent, adică setul tuturor soluțiilor este gol. Un caz destul de rar care este ușor de detectat indiferent de metoda de rezolvare a sistemului.
- Sistemul este consistent și definit, adică are exact o solutie. Varianta clasică, cunoscută încă de la școală.
- Sistemul este consistent și nedefinit, adică are infinit de solutii. Aceasta este cea mai grea varianta. Nu este suficient să afirmăm că „sistemul are un set infinit de soluții” - este necesar să descriem modul în care este aranjat acest set.
Variabila x i se numește permisă dacă este inclusă într-o singură ecuație a sistemului, și cu un coeficient de 1. Cu alte cuvinte, în celelalte ecuații, coeficientul pentru variabila x i trebuie să fie egal cu zero.
Dacă selectăm o variabilă permisă în fiecare ecuație, obținem un set de variabile permise pentru întregul sistem de ecuații. Sistemul în sine, scris în această formă, va fi numit și permis. În general, unul și același sistem inițial poate fi redus la diferite sisteme permise, dar acest lucru nu ne privește acum. Iată exemple de sisteme permise:

Ambele sisteme sunt permise în ceea ce privește variabilele x 1 , x 3 și x 4 . Totuși, cu același succes se poate argumenta că al doilea sistem este permis în raport cu x 1 , x 3 și x 5 . Este suficient să rescrieți cea mai recentă ecuație sub forma x 5 = x 4 .
Acum luați în considerare un caz mai general. Să presupunem că avem k variabile în total, dintre care r sunt permise. Atunci sunt posibile două cazuri:
- Numărul de variabile permise r este egal cu numărul total de variabile k : r = k . Obținem un sistem de k ecuații în care r = k variabile permise. Un astfel de sistem este colaborativ și definit, pentru că x 1 \u003d b 1, x 2 \u003d b 2, ..., x k \u003d b k;
- Numărul de variabile permise r este mai mic decât numărul total de variabile k : r< k . Остальные (k − r ) переменных называются свободными - они могут принимать любые значения, из которых легко вычисляются разрешенные переменные.
Deci, în sistemele de mai sus, variabilele x 2 , x 5 , x 6 (pentru primul sistem) și x 2 , x 5 (pentru al doilea) sunt libere. Cazul când există variabile libere este mai bine formulat ca o teoremă:
Vă rugăm să rețineți: acesta este un punct foarte important! În funcție de modul în care scrieți sistemul final, aceeași variabilă poate fi atât permisă, cât și liberă. Cei mai mulți profesori avansați de matematică recomandă să scrieți variabilele în ordine lexicografică, de exemplu. indice ascendent. Cu toate acestea, nu trebuie să urmați deloc acest sfat.
Teorema. Dacă într-un sistem de n ecuații variabilele x 1 , x 2 , ..., x r sunt permise și x r + 1 , x r + 2 , ..., x k sunt libere, atunci:
- Dacă setăm valorile variabilelor libere (x r + 1 = t r + 1 , x r + 2 = t r + 2 , ..., x k = t k ), și apoi găsim valorile x 1 , x 2 , . .., x r , obținem una dintre soluții.
- Dacă valorile variabilelor libere din două soluții sunt aceleași, atunci și valorile variabilelor permise sunt aceleași, adică. solutiile sunt egale.
Care este sensul acestei teoreme? Pentru a obține toate soluțiile sistemului de ecuații permis, este suficient să evidențiem variabilele libere. Apoi, atribuind diferite valori variabilelor libere, vom obține soluții gata făcute. Asta e tot - în acest fel poți obține toate soluțiile sistemului. Nu există alte soluții.
Concluzie: sistemul de ecuații permis este întotdeauna consistent. Dacă numărul de ecuații din sistemul permis este egal cu numărul de variabile, sistemul va fi definit; dacă este mai mic, va fi nedefinit.
Și totul ar fi în regulă, dar se pune întrebarea: cum să obțineți cel rezolvat din sistemul original de ecuații? Pentru asta există
Conținutul lecțieiEcuații liniare cu două variabile
Elevul are 200 de ruble pentru a lua prânzul la școală. Un tort costă 25 de ruble, iar o ceașcă de cafea costă 10 ruble. Câte prăjituri și cești de cafea poți cumpăra cu 200 de ruble?
Indicați numărul de prăjituri prin X, și numărul de cești de cafea prin y. Apoi costul prăjiturii va fi notat cu expresia 25 X, iar costul ceștilor de cafea în 10 y .
25X- Preț X prăjituri
10y- Preț y cesti de cafea
Suma totală ar trebui să fie de 200 de ruble. Apoi obținem o ecuație cu două variabile Xși y
25X+ 10y= 200
Câte rădăcini are această ecuație?
Totul depinde de apetitul elevului. Dacă cumpără 6 prăjituri și 5 căni de cafea, atunci rădăcinile ecuației vor fi numerele 6 și 5.
Se spune că perechea de valori 6 și 5 este rădăcinile ecuației 25 X+ 10y= 200 . Scris ca (6; 5) , primul număr fiind valoarea variabilei X, iar al doilea - valoarea variabilei y .
6 și 5 nu sunt singurele rădăcini care inversează ecuația 25 X+ 10y= 200 la identitate. Dacă doriți, pentru aceleași 200 de ruble, un student poate cumpăra 4 prăjituri și 10 căni de cafea:

În acest caz, rădăcinile ecuației 25 X+ 10y= 200 este perechea de valori (4; 10) .
În plus, un student poate să nu cumpere cafea deloc, ci să cumpere prăjituri pentru toate cele 200 de ruble. Apoi rădăcinile ecuației 25 X+ 10y= 200 vor fi valorile 8 și 0

Sau invers, nu cumpărați prăjituri, ci cumpărați cafea pentru toate cele 200 de ruble. Apoi rădăcinile ecuației 25 X+ 10y= 200 vor fi valorile 0 și 20

Să încercăm să enumerăm toate rădăcinile posibile ale ecuației 25 X+ 10y= 200 . Să fim de acord că valorile Xși y aparțin mulțimii numerelor întregi. Și să fie aceste valori mai mari sau egale cu zero:
X∈Z, y∈ Z;
x ≥ 0, y ≥ 0
Deci, va fi convenabil pentru student însuși. Prăjiturile sunt mai convenabile de cumpărat întregi decât, de exemplu, mai multe prăjituri întregi și o jumătate de prăjitură. Cafeaua este, de asemenea, mai convenabil să luați în căni întregi decât, de exemplu, mai multe căni întregi și o jumătate de ceașcă.
Rețineți că pentru ciudat X este imposibil să se obțină egalitate sub niciuna y. Apoi valorile X vor fi următoarele numere 0, 2, 4, 6, 8. Și știind X poate fi ușor de determinat y

Astfel, am obținut următoarele perechi de valori (0; 20), (2; 15), (4; 10), (6; 5), (8; 0). Aceste perechi sunt soluții sau rădăcini ale ecuației 25 X+ 10y= 200. Ei transformă această ecuație într-o identitate.
Tip ecuație ax + by = c numit ecuație liniară cu două variabile. O soluție sau rădăcini ale acestei ecuații sunt o pereche de valori ( X; y), care o transformă într-o identitate.
De asemenea, rețineți că dacă o ecuație liniară cu două variabile este scrisă ca ax + b y = c , apoi spun că este scris în canonic formă (normală).
Unele ecuații liniare în două variabile pot fi reduse la formă canonică.
De exemplu, ecuația 2(16X+ 3y- 4) = 2(12 + 8X − y) poate fi adus în minte ax + by = c. Să deschidem parantezele din ambele părți ale acestei ecuații, obținem 32X + 6y − 8 = 24 + 16X − 2y . Termenii care conțin necunoscute sunt grupați în partea stângă a ecuației, iar termenii fără necunoscute sunt grupați în dreapta. Apoi primim 32X - 16X+ 6y+ 2y = 24 + 8 . Aducem termeni similari în ambele părți, obținem ecuația 16 X+ 8y= 32. Această ecuație se reduce la forma ax + by = cși este canonică.
Ecuația 25 considerată mai devreme X+ 10y= 200 este, de asemenea, o ecuație liniară cu două variabile în formă canonică. În această ecuație, parametrii A , bși c sunt egale cu valorile 25, 10 și, respectiv, 200.
De fapt, ecuația ax + by = c are un număr infinit de soluții. Rezolvarea ecuației 25X+ 10y= 200, i-am căutat rădăcinile doar pe mulțimea numerelor întregi. Drept urmare, am obținut mai multe perechi de valori care au transformat această ecuație într-o identitate. Dar pe setul de numere raționale ecuația 25 X+ 10y= 200 va avea un număr infinit de soluții.
Pentru a obține perechi noi de valori, trebuie să luați o valoare arbitrară pentru X, apoi exprima y. De exemplu, să luăm o variabilă X valoarea 7. Apoi obținem o ecuație cu o variabilă 25×7 + 10y= 200 în care să se exprime y

Lasa X= 15 . Apoi ecuația 25X+ 10y= 200 devine 25 × 15 + 10y= 200. De aici aflăm că y = −17,5

Lasa X= −3 . Apoi ecuația 25X+ 10y= 200 devine 25 × (−3) + 10y= 200. De aici aflăm că y = −27,5

Sistem de două ecuații liniare cu două variabile
Pentru ecuație ax + by = c puteți lua de câte ori valori arbitrare pentru Xși găsiți valori pentru y. Luată separat, o astfel de ecuație va avea un număr infinit de soluții.
Dar se întâmplă și ca variabilele Xși y legate nu de una, ci de două ecuații. În acest caz, ele formează așa-numitul sistem de ecuații liniare cu două variabile. Un astfel de sistem de ecuații poate avea o pereche de valori (sau cu alte cuvinte: „o soluție”).
De asemenea, se poate întâmpla ca sistemul să nu aibă deloc soluții. Un sistem de ecuații liniare poate avea un număr infinit de soluții în cazuri rare și excepționale.
Două ecuații liniare formează un sistem când valorile Xși y sunt incluse în fiecare dintre aceste ecuații.
Să revenim la prima ecuație 25 X+ 10y= 200 . Una dintre perechile de valori pentru această ecuație a fost perechea (6; 5). Acesta este cazul când 200 de ruble ar putea cumpăra 6 prăjituri și 5 căni de cafea.
Compunem problema astfel încât perechea (6; 5) să devină singura soluție pentru ecuația 25 X+ 10y= 200 . Pentru a face acest lucru, compunem o altă ecuație care ar conecta aceeași X prajituri si y cesti de cafea.
Să punem textul sarcinii după cum urmează:
„Un școlar a cumpărat mai multe prăjituri și câteva cești de cafea pentru 200 de ruble. Un tort costă 25 de ruble, iar o ceașcă de cafea costă 10 ruble. Câte prăjituri și cești de cafea a cumpărat elevul dacă se știe că numărul de prăjituri este cu unul mai mult decât numărul de cești de cafea?
Avem deja prima ecuație. Aceasta este ecuația 25 X+ 10y= 200 . Acum să scriem o ecuație pentru condiție „numărul de prăjituri este cu o unitate mai mult decât numărul de cești de cafea” .
Numărul de prăjituri este X, iar numărul de cești de cafea este y. Puteți scrie această expresie folosind ecuația x − y= 1. Această ecuație ar însemna că diferența dintre prăjituri și cafea este 1.
x=y+ 1 . Această ecuație înseamnă că numărul de prăjituri este cu unul mai mult decât numărul de cești de cafea. Prin urmare, pentru a obține egalitate, la numărul de cești de cafea se adaugă una. Acest lucru poate fi ușor de înțeles dacă folosim modelul de greutate pe care l-am luat în considerare atunci când studiem cele mai simple probleme:

Am două ecuații: 25 X+ 10y= 200 și x=y+ 1. Deoarece valorile Xși y, și anume 6 și 5 sunt incluse în fiecare dintre aceste ecuații, apoi împreună formează un sistem. Să scriem acest sistem. Dacă ecuațiile formează un sistem, atunci ele sunt încadrate de semnul sistemului. Semnul de sistem este o acoladă:

Să rezolvăm acest sistem. Acest lucru ne va permite să vedem cum ajungem la valorile 6 și 5. Există multe metode de rezolvare a unor astfel de sisteme. Luați în considerare cele mai populare dintre ele.
Metoda de substituire
Numele acestei metode vorbește de la sine. Esența sa este de a substitui o ecuație în alta, după ce a exprimat anterior una dintre variabile.
În sistemul nostru, nimic nu trebuie exprimat. În a doua ecuație X = y+ 1 variabilă X deja exprimat. Această variabilă este egală cu expresia y+ 1 . Apoi puteți înlocui această expresie în prima ecuație în loc de variabilă X

După înlocuirea expresiei y+ 1 în prima ecuație X, obținem ecuația 25(y+ 1) + 10y= 200 . Aceasta este o ecuație liniară cu o variabilă. Această ecuație este destul de ușor de rezolvat:

Am găsit valoarea variabilei y. Acum înlocuim această valoare într-una dintre ecuații și găsim valoarea X. Pentru aceasta, este convenabil să folosiți a doua ecuație X = y+ 1 . Să punem valoare în ea y
Deci perechea (6; 5) este o soluție a sistemului de ecuații, așa cum ne-am propus. Verificăm și ne asigurăm că perechea (6; 5) satisface sistemul:

Exemplul 2

Înlocuiți prima ecuație X= 2 + yîn a doua ecuație 3 X - 2y= 9 . În prima ecuație, variabila X este egală cu expresia 2 + y. Înlocuim această expresie în a doua ecuație în loc de X

Acum să găsim valoarea X. Pentru a face acest lucru, înlocuiți valoarea yîn prima ecuație X= 2 + y
Deci soluția sistemului este valoarea perechii (5; 3)
Exemplul 3. Rezolvați următorul sistem de ecuații folosind metoda substituției:

Aici, spre deosebire de exemplele anterioare, una dintre variabile nu este exprimată în mod explicit.
Pentru a înlocui o ecuație în alta, mai întâi aveți nevoie de .
Este de dorit să se exprime variabila care are un coeficient de unu. Unitatea de coeficient are o variabilă X, care este cuprinsă în prima ecuație X+ 2y= 11 . Să exprimăm această variabilă.
După o expresie variabilă X, sistemul nostru va arăta astfel:

Acum înlocuim prima ecuație în a doua și găsim valoarea y

Substitui y X

Deci soluția sistemului este o pereche de valori (3; 4)
Desigur, puteți exprima și o variabilă y. Rădăcinile nu se vor schimba. Dar dacă exprimi y, rezultatul nu este o ecuație foarte simplă, a cărei rezolvare va dura mai mult timp. Va arata asa:

Vedem că în acest exemplu pentru a exprima X mult mai convenabil decât exprimarea y .
Exemplul 4. Rezolvați următorul sistem de ecuații folosind metoda substituției:

Exprimați în prima ecuație X. Apoi sistemul va lua forma:

y

Substitui yîn prima ecuație și găsiți X. Puteți folosi ecuația originală 7 X+ 9y= 8 , sau utilizați ecuația în care este exprimată variabila X. Vom folosi această ecuație, deoarece este convenabil:
![]()
Deci soluția sistemului este perechea de valori (5; −3)
Metoda de adunare
Metoda adunării este de a adăuga termen cu termen ecuațiile incluse în sistem. Această adăugare are ca rezultat o nouă ecuație cu o singură variabilă. Și este destul de ușor să rezolvi această ecuație.
Să rezolvăm următorul sistem de ecuații:

Adăugați partea stângă a primei ecuații la partea stângă a celei de-a doua ecuații. Și partea dreaptă a primei ecuații cu partea dreaptă a celei de-a doua ecuații. Obținem următoarea egalitate:
Iată termeni similari:

Ca rezultat, am obținut cea mai simplă ecuație 3 X= 27 a cărui rădăcină este 9. Cunoscând valoarea X puteți găsi valoarea y. Înlocuiți valoarea Xîn a doua ecuație x − y= 3 . Obținem 9 − y= 3 . De aici y= 6 .
Deci soluția sistemului este o pereche de valori (9; 6)
Exemplul 2

Adăugați partea stângă a primei ecuații la partea stângă a celei de-a doua ecuații. Și partea dreaptă a primei ecuații cu partea dreaptă a celei de-a doua ecuații. În egalitatea rezultată, prezentăm termeni similari:

Ca rezultat, am obținut cea mai simplă ecuație 5 X= 20, a cărui rădăcină este 4. Cunoscând valoarea X puteți găsi valoarea y. Înlocuiți valoarea Xîn prima ecuație 2 x+y= 11 . Să obținem 8 + y= 11 . De aici y= 3 .
Deci soluția sistemului este perechea de valori (4;3)
Procesul de adăugare nu este descris în detaliu. Trebuie făcut în minte. Când se adună, ambele ecuații trebuie reduse la formă canonică. Adică ac+by=c .
Din exemplele luate în considerare, se poate observa că scopul principal al adunării ecuațiilor este acela de a scăpa de una dintre variabile. Dar nu este întotdeauna posibil să se rezolve imediat sistemul de ecuații prin metoda adunării. Cel mai adesea, sistemul este adus preliminar într-o formă în care este posibilă adăugarea ecuațiilor incluse în acest sistem.
De exemplu, sistemul  poate fi rezolvată direct prin metoda adunării. Când se adună ambele ecuații, termenii yși −y dispar deoarece suma lor este zero. Ca rezultat, cea mai simplă ecuație este formată 11 X= 22 , a cărui rădăcină este 2. Atunci se va putea determina y egal cu 5.
poate fi rezolvată direct prin metoda adunării. Când se adună ambele ecuații, termenii yși −y dispar deoarece suma lor este zero. Ca rezultat, cea mai simplă ecuație este formată 11 X= 22 , a cărui rădăcină este 2. Atunci se va putea determina y egal cu 5.
Și sistemul de ecuații  metoda adunării nu poate fi rezolvată imediat, deoarece aceasta nu va duce la dispariția uneia dintre variabile. Adunarea va rezulta în ecuația 8 X+ y= 28 , care are un număr infinit de soluții.
metoda adunării nu poate fi rezolvată imediat, deoarece aceasta nu va duce la dispariția uneia dintre variabile. Adunarea va rezulta în ecuația 8 X+ y= 28 , care are un număr infinit de soluții.
Dacă ambele părți ale ecuației sunt înmulțite sau împărțite cu același număr care nu este egal cu zero, atunci se va obține o ecuație echivalentă cu cea dată. Această regulă este valabilă și pentru un sistem de ecuații liniare cu două variabile. Una dintre ecuații (sau ambele ecuații) poate fi înmulțită cu un anumit număr. Rezultatul este un sistem echivalent, ale cărui rădăcini vor coincide cu cel anterior.
Să revenim la primul sistem, care descria câte prăjituri și cești de cafea a cumpărat studentul. Soluția acestui sistem a fost o pereche de valori (6; 5).
Înmulțim ambele ecuații incluse în acest sistem cu câteva numere. Să presupunem că înmulțim prima ecuație cu 2 și a doua cu 3

Rezultatul este un sistem 
Soluția acestui sistem este încă perechea de valori (6; 5)

Aceasta înseamnă că ecuațiile incluse în sistem pot fi reduse la o formă adecvată pentru aplicarea metodei de adunare.
Înapoi la sistem , pe care nu l-am putut rezolva prin metoda adunării.
Înmulțiți prima ecuație cu 6 și a doua cu −2

Apoi obținem următorul sistem:

Adăugăm ecuațiile incluse în acest sistem. Adăugarea componentelor 12 Xși -12 X va rezulta 0, adunare 18 yși 4 y va da 22 y, iar adunând 108 și −20 dă 88. Apoi obțineți ecuația 22 y= 88, prin urmare y = 4 .
Dacă la început este dificil să adaugi ecuații în mintea ta, atunci poți scrie cum se adaugă partea stângă a primei ecuații la partea stângă a celei de-a doua ecuații și partea dreaptă a primei ecuații în partea dreaptă a a doua ecuatie:

Știind că valoarea variabilei y este 4, puteți găsi valoarea X. Substitui yîntr-una dintre ecuații, de exemplu în prima ecuație 2 X+ 3y= 18 . Apoi obținem o ecuație cu o variabilă 2 X+ 12 = 18 . Transferăm 12 în partea dreaptă, schimbând semnul, obținem 2 X= 6, prin urmare X = 3 .
Exemplul 4. Rezolvați următorul sistem de ecuații folosind metoda adunării:

Înmulțiți a doua ecuație cu −1. Apoi sistemul va lua următoarea formă:

Să adăugăm ambele ecuații. Adăugarea componentelor Xși −x va rezulta 0, adunare 5 yși 3 y va da 8 y, iar adunând 7 și 1 rezultă 8. Rezultatul este ecuația 8 y= 8 , a cărui rădăcină este 1. Știind că valoarea y este 1, puteți găsi valoarea X .
Substitui yîn prima ecuație, obținem X+ 5 = 7, prin urmare X= 2
Exemplul 5. Rezolvați următorul sistem de ecuații folosind metoda adunării:

Este de dorit ca termenii care conțin aceleași variabile să fie amplasați unul sub celălalt. Prin urmare, în a doua ecuație, termenii 5 yși −2 X schimba locurile. Ca urmare, sistemul va lua forma:

Înmulțiți a doua ecuație cu 3. Apoi sistemul va lua forma:

Acum să adăugăm ambele ecuații. Ca rezultat al adunării, obținem ecuația 8 y= 16, a cărui rădăcină este 2.
Substitui yîn prima ecuație, obținem 6 X− 14 = 40 . Transferăm termenul −14 în partea dreaptă, schimbând semnul, obținem 6 X= 54 . De aici X= 9.
Exemplul 6. Rezolvați următorul sistem de ecuații folosind metoda adunării:

Să scăpăm de fracții. Înmulțiți prima ecuație cu 36 și a doua cu 12
În sistemul rezultat  prima ecuație poate fi înmulțită cu −5 și a doua cu 8
prima ecuație poate fi înmulțită cu −5 și a doua cu 8

Să adăugăm ecuațiile din sistemul rezultat. Apoi obținem cea mai simplă ecuație −13 y= −156 . De aici y= 12 . Substitui yîn prima ecuație și găsiți X

Exemplul 7. Rezolvați următorul sistem de ecuații folosind metoda adunării:

Aducem ambele ecuații la forma normală. Aici este convenabil să se aplice regula proporției în ambele ecuații. Dacă în prima ecuație partea dreaptă este reprezentată ca , iar partea dreaptă a celei de-a doua ecuații ca , atunci sistemul va lua forma:

Avem o proporție. Îi înmulțim termenii extremi și medii. Apoi sistemul va lua forma:

Înmulțim prima ecuație cu −3 și deschidem parantezele în a doua:

Acum să adăugăm ambele ecuații. Ca rezultat al adunării acestor ecuații, obținem o egalitate, în ambele părți din care va fi zero:

Se dovedește că sistemul are un număr infinit de soluții.
Dar nu putem lua pur și simplu valori arbitrare din cer pentru Xși y. Putem specifica una dintre valori, iar cealalta va fi determinata in functie de valoarea specificata de noi. De exemplu, lasa X= 2 . Înlocuiți această valoare în sistem:

Ca urmare a rezolvării uneia dintre ecuații, valoarea pt y, care va satisface ambele ecuații:

Perechea rezultată de valori (2; −2) va satisface sistemul:
Să găsim o altă pereche de valori. Lasa X= 4. Înlocuiți această valoare în sistem:

Se poate determina cu ochii că y este egal cu zero. Apoi obținem o pereche de valori (4; 0), care ne satisface sistemul:

Exemplul 8. Rezolvați următorul sistem de ecuații folosind metoda adunării:

Înmulțiți prima ecuație cu 6 și a doua cu 12

Să rescriem ce a mai rămas:


Înmulțiți prima ecuație cu −1. Apoi sistemul va lua forma:

Acum să adăugăm ambele ecuații. Ca rezultat al adunării, se formează ecuația 6 b= 48 , a cărui rădăcină este 8. Înlocuitor bîn prima ecuație și găsiți A

Sistem de ecuații liniare cu trei variabile
O ecuație liniară cu trei variabile include trei variabile cu coeficienți, precum și o intersecție. În formă canonică, se poate scrie după cum urmează:
ax + by + cz = d
Această ecuație are un număr infinit de soluții. Dând două variabile valori diferite, poate fi găsită o a treia valoare. Soluția în acest caz este triplul valorilor ( X; y; z) care transformă ecuația într-o identitate.
Dacă variabile x, y, z sunt interconectate prin trei ecuații, apoi se formează un sistem de trei ecuații liniare cu trei variabile. Pentru a rezolva un astfel de sistem, puteți aplica aceleași metode care se aplică ecuațiilor liniare cu două variabile: metoda substituției și metoda adunării.
Exemplul 1. Rezolvați următorul sistem de ecuații folosind metoda substituției:

Exprimăm în a treia ecuație X. Apoi sistemul va lua forma:

Acum să facem înlocuirea. Variabil X este egală cu expresia 3 − 2y − 2z . Înlocuiți această expresie în prima și a doua ecuație:

Să deschidem parantezele din ambele ecuații și să dăm termeni similari:

Am ajuns la un sistem de ecuații liniare cu două variabile. În acest caz, este convenabil să aplicați metoda de adăugare. Ca urmare, variabila y va dispărea și putem găsi valoarea variabilei z
![]()
Acum să găsim valoarea y. Pentru aceasta, este convenabil să folosiți ecuația − y+ z= 4. Înlocuiți valoarea z

Acum să găsim valoarea X. Pentru aceasta, este convenabil să folosiți ecuația X= 3 − 2y − 2z . Înlocuiți valorile în el yși z

Astfel, triplul valorilor (3; −2; 2) este soluția sistemului nostru. Prin verificare, ne asigurăm că aceste valori satisfac sistemul:

Exemplul 2. Rezolvați sistemul prin metoda adunării

Să adunăm prima ecuație cu a doua înmulțită cu −2.
Dacă a doua ecuație este înmulțită cu −2, atunci ea va lua forma −6X+ 6y- 4z = −4 . Acum adăugați-l la prima ecuație:

Vedem că în urma transformărilor elementare s-a determinat valoarea variabilei X. Este egal cu unu.
Să revenim la sistemul principal. Să adunăm a doua ecuație cu a treia înmulțită cu −1. Dacă a treia ecuație este înmulțită cu −1, atunci ea va lua forma −4X + 5y − 2z = −1 . Acum adăugați-l la a doua ecuație:

Am primit ecuația X - 2y= −1 . Înlocuiți valoarea în ea X pe care le-am găsit mai devreme. Apoi putem determina valoarea y

Acum cunoaștem valorile Xși y. Acest lucru vă permite să determinați valoarea z. Folosim una dintre ecuațiile incluse în sistem:

Astfel, triplul valorilor (1; 1; 1) este soluția sistemului nostru. Prin verificare, ne asigurăm că aceste valori satisfac sistemul:

Sarcini pentru compilarea sistemelor de ecuații liniare
Sarcina de compilare a sistemelor de ecuații este rezolvată prin introducerea mai multor variabile. În continuare, ecuațiile sunt compilate pe baza condițiilor problemei. Din ecuațiile compilate, ele formează un sistem și îl rezolvă. După rezolvarea sistemului, este necesar să se verifice dacă soluția acestuia îndeplinește condițiile problemei.
Sarcina 1. O mașină Volga a părăsit orașul spre ferma colectivă. S-a întors înapoi pe un alt drum, care era cu 5 km mai scurt decât primul. În total, mașina a parcurs 35 de km în ambele sensuri. Câți kilometri are fiecare drum?
Decizie
Lasa X- lungimea primului drum, y- lungimea secundei. Dacă mașina a condus 35 km în ambele sensuri, atunci prima ecuație poate fi scrisă ca X+ y= 35. Această ecuație descrie suma lungimilor ambelor drumuri.
Se spune că mașina se întorcea înapoi pe drum, care era mai scurt decât primul cu 5 km. Atunci a doua ecuație poate fi scrisă ca X− y= 5. Această ecuație arată că diferența dintre lungimile drumurilor este de 5 km.
Sau a doua ecuație poate fi scrisă ca X= y+ 5 . Vom folosi această ecuație.
Din moment ce variabilele Xși yîn ambele ecuații notăm același număr, atunci putem forma un sistem din ele:
Să rezolvăm acest sistem folosind una dintre metodele studiate anterior. În acest caz, este convenabil să folosiți metoda substituției, deoarece în a doua ecuație variabila X deja exprimat.
Înlocuiți a doua ecuație în prima și găsiți y
Înlocuiți valoarea găsită yîn a doua ecuație X= y+ 5 și găsiți X
Lungimea primului drum a fost notata cu variabila X. Acum i-am găsit sensul. Variabil X este 20. Deci lungimea primului drum este de 20 km.
Iar lungimea celui de-al doilea drum era indicată de y. Valoarea acestei variabile este 15. Deci lungimea celui de-al doilea drum este de 15 km.
Hai să facem o verificare. Mai întâi, să ne asigurăm că sistemul este rezolvat corect:

Acum să verificăm dacă soluția (20; 15) satisface condițiile problemei.
Se spunea că în total mașina a parcurs 35 de km în ambele sensuri. Adunăm lungimile ambelor drumuri și ne asigurăm că soluția (20; 15) îndeplinește această condiție: 20 km + 15 km = 35 km
Următoarea condiție: mașina s-a întors înapoi pe un alt drum, care era cu 5 km mai scurt decât primul . Vedem că soluția (20; 15) îndeplinește și această condiție, deoarece 15 km este mai scurt decât 20 km cu 5 km: 20 km − 15 km = 5 km
La compilarea unui sistem, este important ca variabilele să desemneze aceleași numere în toate ecuațiile incluse în acest sistem.
Deci sistemul nostru conține două ecuații. Aceste ecuații conțin la rândul lor variabilele Xși y, care denotă aceleași numere în ambele ecuații și anume lungimile drumurilor egale cu 20 km și 15 km.
Sarcina 2. Pe platformă au fost încărcate traverse de stejar și pin, în total 300 de traverse. Se știe că toate traversele de stejar cântăreau cu 1 tonă mai puțin decât toate traversele de pin. Stabiliți câte traverse de stejar și pin au fost separat, dacă fiecare traversă de stejar cântărea 46 kg și fiecare traversă de pin 28 kg.
Decizie
Lasa X stejar şi y traverse de pin au fost încărcate pe platformă. Dacă au fost 300 de traverse în total, atunci prima ecuație poate fi scrisă ca x+y = 300 .
Toate traversele de stejar cântăreau 46 X kg, iar pinul cântărea 28 y kg. Deoarece traversele de stejar cântăreau cu 1 tonă mai puțin decât traversele de pin, a doua ecuație poate fi scrisă ca 28y- 46X= 1000 . Această ecuație arată că diferența de masă dintre traversele de stejar și pin este de 1000 kg.
Tonele au fost convertite în kilograme deoarece masa traverselor de stejar și pin se măsoară în kilograme.
Ca rezultat, obținem două ecuații care formează sistemul

Să rezolvăm acest sistem. Exprimați în prima ecuație X. Apoi sistemul va lua forma:

Înlocuiți prima ecuație în a doua și găsiți y

Substitui yîn ecuație X= 300 − y si afla ce X

Aceasta înseamnă că 100 de traverse de stejar și 200 de pin au fost încărcate pe platformă.
Să verificăm dacă soluția (100; 200) satisface condițiile problemei. Mai întâi, să ne asigurăm că sistemul este rezolvat corect:

Se spunea că erau 300 de dormitoare în total. Adunăm numărul de traverse de stejar și pin și ne asigurăm că soluția (100; 200) îndeplinește această condiție: 100 + 200 = 300.
Următoarea condiție: toate traversele de stejar cântăreau cu 1 tonă mai puțin decât toți cei de pin . Vedem că soluția (100; 200) îndeplinește și această condiție, deoarece 46 × 100 kg de traverse de stejar sunt mai ușoare decât 28 × 200 kg de traverse de pin: 5600 kg − 4600 kg = 1000 kg.
Sarcina 3. Am luat trei bucăți dintr-un aliaj de cupru și nichel în raporturi de 2: 1, 3: 1 și 5: 1 în greutate. Dintre acestea, o piesă cu greutatea de 12 kg a fost topită cu un raport de conținut de cupru și nichel de 4: 1. Aflați masa fiecărei piese originale dacă masa primei dintre ele este de două ori masa celei de-a doua.
Sisteme de ecuații liniare. Cursul 6
Sisteme de ecuații liniare.
Noțiuni de bază.
sistem de vizualizare
numit sistem - ecuații liniare cu necunoscute.
Numerele , , sunt numite coeficienții sistemului.
Se numesc numere membri liberi ai sistemului, – variabile de sistem. Matrice

numit matricea principală a sistemului, și matricea

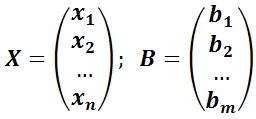
– sistem de matrice extinsă. Matrici - coloane
Și în mod corespunzător matrici de membri liberi și necunoscute ale sistemului. Apoi, sub formă de matrice, sistemul de ecuații poate fi scris ca . Soluție de sistem se numește valorile variabilelor, la înlocuirea cărora, toate ecuațiile sistemului se transformă în adevărate egalități numerice. Orice soluție a sistemului poate fi reprezentată ca o coloană-matrice. Atunci egalitatea matricei este adevărată.
Sistemul de ecuații se numește comun dacă are cel puţin o soluţie şi incompatibil daca nu are solutie.
A rezolva un sistem de ecuații liniare înseamnă a afla dacă este compatibil și, dacă este compatibil, a-i găsi soluția generală.
Sistemul este numit omogen dacă toți termenii săi liberi sunt egali cu zero. Un sistem omogen este întotdeauna compatibil pentru că are o soluție
Teorema Kronecker-Kopelli.
Răspunsul la întrebarea existenței soluțiilor sistemelor liniare și unicitatea acestora ne permite să obținem următorul rezultat, care poate fi formulat ca următoarele afirmații despre un sistem de ecuații liniare cu necunoscute
 (1)
(1)
Teorema 2. Sistemul de ecuații liniare (1) este consistent dacă și numai dacă rangul matricei principale este egal cu rangul celei extinse (.
Teorema 3. Dacă rangul matricei principale a unui sistem comun de ecuații liniare este egal cu numărul de necunoscute, atunci sistemul are o soluție unică.
Teorema 4. Dacă rangul matricei principale a unui sistem comun este mai mic decât numărul de necunoscute, atunci sistemul are un număr infinit de soluții.
Reguli pentru rezolvarea sistemelor.
3. Aflați expresia variabilelor principale în termenii celor libere și obțineți soluția generală a sistemului.
4. Prin acordarea de valori arbitrare variabilelor libere, se obțin toate valorile variabilelor principale.
Metode de rezolvare a sistemelor de ecuaţii liniare.
Metoda matricei inverse.

și, adică sistemul are o soluție unică. Scriem sistemul sub formă de matrice
Unde  ,
,
.
,
,
.
Înmulțiți ambele părți ale ecuației matriceale din stânga cu matricea
Deoarece , obținem , din care obținem egalitate pentru găsirea necunoscutelor
Exemplul 27. Folosind metoda matricei inverse, rezolvați sistemul de ecuații liniare 
Decizie. Se notează prin matricea principală a sistemului
 .
.
Fie , atunci găsim soluția prin formula .
Să calculăm.

Din , atunci sistemul are o soluție unică. Găsiți toate adunările algebrice
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Prin urmare
 .
.
Sa verificam

 .
.
Matricea inversă este găsită corect. De aici, folosind formula , găsim matricea de variabile .

 .
.
Comparând valorile matricelor, obținem răspunsul: .
metoda lui Cramer.
Să fie dat un sistem de ecuații liniare cu necunoscute

și, adică sistemul are o soluție unică. Scriem soluția sistemului sub formă de matrice sau

![]()
Denota


. . . . . . . . . . . . . . ,

Astfel, obținem formule pentru găsirea valorilor necunoscutelor, care sunt numite formulele lui Cramer.
![]()
Exemplul 28. Rezolvați următorul sistem de ecuații liniare folosind metoda lui Cramer  .
.
Decizie. Aflați determinantul matricei principale a sistemului
 .
.
De atunci, sistemul are o soluție unică.
Găsiți determinanții rămași pentru formulele lui Cramer
 ,
,
 ,
,
 .
.
Folosind formulele lui Cramer, găsim valorile variabilelor
metoda Gauss.
Metoda constă în excluderea secvenţială a variabilelor.
Să fie dat un sistem de ecuații liniare cu necunoscute.

Procesul de soluție Gaussian constă din două etape:
În prima etapă, matricea extinsă a sistemului este redusă la forma treptat cu ajutorul transformărilor elementare
 ,
,
unde , care corespunde sistemului

După aceea variabilele ![]() sunt considerate libere și în fiecare ecuație sunt transferate în partea dreaptă.
sunt considerate libere și în fiecare ecuație sunt transferate în partea dreaptă.
În a doua etapă, variabila este exprimată din ultima ecuație, valoarea rezultată este substituită în ecuație. Din această ecuație
variabila este exprimata. Acest proces continuă până la prima ecuație. Rezultatul este o expresie a variabilelor principale în termeni de variabile libere ![]() .
.
Exemplul 29. Rezolvați următorul sistem folosind metoda Gaussiană

Decizie. Să scriem matricea extinsă a sistemului și să o reducem la forma de pas

 .
.
La fel de ![]() este mai mare decât numărul de necunoscute, atunci sistemul este compatibil și are un număr infinit de soluții. Să notăm sistemul pentru matricea pasilor
este mai mare decât numărul de necunoscute, atunci sistemul este compatibil și are un număr infinit de soluții. Să notăm sistemul pentru matricea pasilor

Determinantul matricei extinse a acestui sistem, compus din primele trei coloane, nu este egal cu zero, deci îl considerăm de bază. Variabile
Va fi de bază, iar variabila va fi liberă. Să-l mutăm în toate ecuațiile în partea stângă

Din ultima ecuație pe care o exprimăm
![]()
Înlocuind această valoare în penultima a doua ecuație, obținem
![]()
![]() Unde
Unde ![]() . Înlocuind valorile variabilelor și în prima ecuație, găsim
. Înlocuind valorile variabilelor și în prima ecuație, găsim ![]() . Scriem răspunsul în forma următoare
. Scriem răspunsul în forma următoare
- Sisteme m ecuații liniare cu n necunoscut.
Rezolvarea unui sistem de ecuații liniare este un astfel de set de numere ( x 1 , x 2 , …, x n), înlocuind cu care în fiecare dintre ecuațiile sistemului se obține egalitatea corectă.
Unde a ij , i = 1, …, m; j = 1, …, n sunt coeficienții sistemului;
b i , i = 1, …, m- membri gratuiti;
x j , j = 1, …, n- necunoscut.
Sistemul de mai sus poate fi scris sub formă de matrice: A X = B,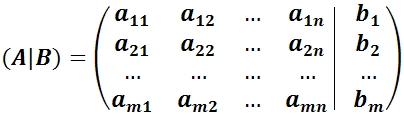
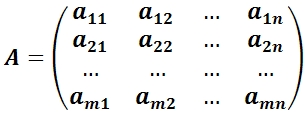
Unde ( A|B) este matricea principală a sistemului;
A— matrice extinsă a sistemului;
X— coloana de necunoscute;
B este o coloană de membri liberi.
Dacă matricea B nu este o matrice nulă ∅, atunci acest sistem de ecuații liniare se numește neomogen.
Dacă matricea B= ∅, atunci acest sistem de ecuații liniare se numește omogen. Un sistem omogen are întotdeauna o soluție zero (trivială): x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Sistem comun de ecuații liniare este un sistem de ecuații liniare care are o soluție.
Sistem inconsecvent de ecuații liniare este un sistem de ecuații liniare care nu are soluție.
Anumit sistem de ecuații liniare este un sistem de ecuații liniare care are o soluție unică.
Sistem nedefinit de ecuații liniare este un sistem de ecuații liniare care are un număr infinit de soluții. - Sisteme de n ecuații liniare cu n necunoscute
Dacă numărul de necunoscute este egal cu numărul de ecuații, atunci matricea este pătrată. Determinantul matricei se numește determinantul principal al sistemului de ecuații liniare și este notat cu simbolul Δ.
Metoda Cramer pentru rezolvarea sistemelor n ecuații liniare cu n necunoscut.
regula lui Cramer.
Dacă determinantul principal al unui sistem de ecuații liniare nu este egal cu zero, atunci sistemul este consistent și definit, iar singura soluție este calculată folosind formulele Cramer:
unde Δ i sunt determinanții obținuți din determinantul principal al sistemului Δ prin înlocuire i a coloana la coloana membrilor liberi. . - Sisteme de m ecuații liniare cu n necunoscute
Teorema Kronecker-Cappelli.
Pentru ca acest sistem de ecuații liniare să fie consistent, este necesar și suficient ca rangul matricei sistemului să fie egal cu rangul matricei extinse a sistemului, rang(Α) = rang(Α|B).
În cazul în care un song(Α) ≠ song(Α|B), atunci sistemul evident nu are soluții.
Dacă rang(Α) = rang(Α|B), atunci sunt posibile două cazuri:
1) sunat(Α) = n(la numarul de necunoscute) - solutia este unica si poate fi obtinuta prin formulele lui Cramer;
2) rang (Α)< n − există infinit de multe soluții. - metoda Gauss pentru rezolvarea sistemelor de ecuații liniare
Să compunem matricea augmentată ( A|B) a sistemului dat de coeficienți din partea necunoscută și din dreapta.
Metoda Gaussiană sau metoda eliminării necunoscutelor constă în reducerea matricei augmentate ( A|B) cu ajutorul transformărilor elementare peste rândurile sale la o formă diagonală (la o formă triunghiulară superioară). Revenind la sistemul de ecuații, toate necunoscutele sunt determinate.
Transformările elementare pe șiruri includ următoarele:
1) schimbarea a două linii;
2) înmulțirea unui șir cu un alt număr decât 0;
3) adăugarea la șir a unui alt șir înmulțit cu un număr arbitrar;
4) eliminarea unui șir nul.
O matrice extinsă redusă la o formă diagonală corespunde unui sistem liniar echivalent cu cel dat, a cărui soluție nu provoacă dificultăți. . - Sistem de ecuații liniare omogene.
Sistemul omogen are forma:
corespunde ecuației matriceale A X = 0.
1) Un sistem omogen este întotdeauna consistent, deoarece r(A) = r(A|B), există întotdeauna o soluție zero (0, 0, …, 0).
2) Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r = r(A)< n , care este echivalent cu Δ = 0.
3) Dacă r< n , atunci Δ = 0, atunci există necunoscute libere c 1 , c 2 , …, c n-r, sistemul are soluții netriviale și există o infinitate de ele.
4) Soluție generală X la r< n poate fi scris sub formă de matrice după cum urmează:
X \u003d c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
unde sunt solutiile X 1 , X 2 , …, X n-r formează un sistem fundamental de soluții.
5) Sistemul fundamental de soluții poate fi obținut din soluția generală a sistemului omogen: ,
,
dacă presupunem succesiv valorile parametrilor să fie (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Descompunerea soluției generale în ceea ce privește sistemul fundamental de soluții este o înregistrare a soluției generale ca o combinație liniară de soluții aparținând sistemului fundamental.
Teorema. Pentru ca un sistem de ecuații liniare omogene să aibă o soluție diferită de zero, este necesar și suficient ca Δ ≠ 0.
Deci, dacă determinantul este Δ ≠ 0, atunci sistemul are o soluție unică.
Dacă Δ ≠ 0, atunci sistemul de ecuații liniare omogene are un număr infinit de soluții.
Teorema. Pentru ca un sistem omogen să aibă o soluție diferită de zero, este necesar și suficient ca r(A)< n .
Dovada:
1) r nu poate fi mai mult n(rangul matricei nu depășește numărul de coloane sau rânduri);
2) r< n , deoarece dacă r=n, atunci determinantul principal al sistemului Δ ≠ 0 și, conform formulelor lui Cramer, există o soluție trivială unică x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0, ceea ce contrazice condiția. Mijloace, r(A)< n .
Consecinţă. Pentru un sistem omogen n ecuații liniare cu n necunoscute are o soluție diferită de zero, este necesar și suficient ca Δ = 0.
Rezolvarea sistemelor de ecuații algebrice liniare (SLAE) este, fără îndoială, cel mai important subiect al cursului de algebră liniară. Un număr mare de probleme din toate ramurile matematicii sunt reduse la rezolvarea sistemelor de ecuații liniare. Acești factori explică motivul creării acestui articol. Materialul articolului este selectat și structurat astfel încât cu ajutorul lui să puteți
- alege metoda optimă pentru rezolvarea sistemului tău de ecuații algebrice liniare,
- studiază teoria metodei alese,
- rezolvați sistemul dvs. de ecuații liniare, luând în considerare în detaliu soluțiile exemplelor și problemelor tipice.
Scurtă descriere a materialului articolului.
În primul rând, dăm toate definițiile și conceptele necesare și introducem unele notații.
În continuare, avem în vedere metode de rezolvare a sistemelor de ecuații algebrice liniare în care numărul de ecuații este egal cu numărul de variabile necunoscute și care au o soluție unică. În primul rând, să ne concentrăm pe metoda Cramer, în al doilea rând, vom prezenta metoda matriceală pentru rezolvarea unor astfel de sisteme de ecuații, iar în al treilea rând, vom analiza metoda Gauss (metoda eliminării succesive a variabilelor necunoscute). Pentru a consolida teoria, cu siguranță vom rezolva mai multe SLAE-uri în diferite moduri.
După aceea, trecem la rezolvarea sistemelor de ecuații algebrice liniare de formă generală, în care numărul de ecuații nu coincide cu numărul de variabile necunoscute sau matricea principală a sistemului este degenerată. Formulăm teorema Kronecker-Capelli, care ne permite să stabilim compatibilitatea SLAE-urilor. Să analizăm soluția sistemelor (în cazul compatibilității lor) folosind conceptul de bază minoră a unei matrice. Vom lua în considerare și metoda Gauss și vom descrie în detaliu soluțiile exemplelor.
Asigurați-vă că vă opriți asupra structurii soluției generale a sistemelor omogene și neomogene de ecuații algebrice liniare. Să dăm conceptul de sistem fundamental de soluții și să arătăm cum este scrisă soluția generală a SLAE folosind vectorii sistemului fundamental de soluții. Pentru o mai bună înțelegere, să ne uităm la câteva exemple.
În concluzie, luăm în considerare sistemele de ecuații care se reduc la cele liniare, precum și diverse probleme, în soluția cărora apar SLAE-uri.
Navigare în pagină.
Definiții, concepte, denumiri.
Vom lua în considerare sisteme de p ecuații algebrice liniare cu n variabile necunoscute (p poate fi egal cu n ) de forma
Variabile necunoscute, - coeficienți (unele numere reale sau complexe), - membri liberi (și numere reale sau complexe).
Această formă de SLAE se numește coordona.
LA formă matriceală acest sistem de ecuații are forma ,
Unde  - matricea principală a sistemului, - matricea-coloana de variabile necunoscute, - matricea-coloana de membri liberi.
- matricea principală a sistemului, - matricea-coloana de variabile necunoscute, - matricea-coloana de membri liberi.
Dacă adăugăm la matricea A ca (n + 1)-a coloană coloana matricei de termeni liberi, atunci obținem așa-numita matrice extinsă sisteme de ecuații liniare. De obicei, matricea mărită este desemnată cu litera T, iar coloana de membri liberi este separată printr-o linie verticală de restul coloanelor, adică 
Prin rezolvarea unui sistem de ecuații algebrice liniare numit un set de valori ale variabilelor necunoscute, care transformă toate ecuațiile sistemului în identități. Ecuația matriceală pentru valorile date ale variabilelor necunoscute se transformă, de asemenea, într-o identitate.
Dacă un sistem de ecuații are cel puțin o soluție, atunci se numește comun.
Dacă sistemul de ecuații nu are soluții, atunci se numește incompatibil.
Dacă un SLAE are o soluție unică, atunci se numește anumit; dacă există mai multe soluții, atunci - incert.
Dacă termenii liberi ai tuturor ecuațiilor sistemului sunt egali cu zero ![]() , atunci sistemul este apelat omogen, in caz contrar - eterogen.
, atunci sistemul este apelat omogen, in caz contrar - eterogen.
Rezolvarea sistemelor elementare de ecuații algebrice liniare.
Dacă numărul de ecuații de sistem este egal cu numărul de variabile necunoscute și determinantul matricei sale principale nu este egal cu zero, atunci vom numi astfel de SLAE-uri elementar. Astfel de sisteme de ecuații au o soluție unică, iar în cazul unui sistem omogen, toate variabilele necunoscute sunt egale cu zero.
Am început să studiem astfel de SLAE în liceu. Când le-am rezolvat, am luat o ecuație, am exprimat o variabilă necunoscută în termenii altora și am înlocuit-o în ecuațiile rămase, apoi am luat următoarea ecuație, am exprimat următoarea variabilă necunoscută și am înlocuit-o în alte ecuații și așa mai departe. Sau au folosit metoda adunării, adică au adăugat două sau mai multe ecuații pentru a elimina unele variabile necunoscute. Nu ne vom opri în detaliu asupra acestor metode, deoarece sunt în esență modificări ale metodei Gauss.
Principalele metode de rezolvare a sistemelor elementare de ecuații liniare sunt metoda Cramer, metoda matriceală și metoda Gauss. Să le rezolvăm.
Rezolvarea sistemelor de ecuații liniare prin metoda lui Cramer.
Trebuie să rezolvăm un sistem de ecuații algebrice liniare 
în care numărul de ecuații este egal cu numărul de variabile necunoscute și determinantul matricei principale a sistemului este diferit de zero, adică .
Fie determinantul matricei principale a sistemului, și ![]() sunt determinanţi ai matricelor care se obţin din A prin înlocuire 1, 2, …, al n-lea coloana respectiv la coloana de membri liberi:
sunt determinanţi ai matricelor care se obţin din A prin înlocuire 1, 2, …, al n-lea coloana respectiv la coloana de membri liberi: 
Cu o astfel de notație, variabilele necunoscute sunt calculate prin formulele metodei lui Cramer ca  . Așa se găsește soluția unui sistem de ecuații algebrice liniare prin metoda Cramer.
. Așa se găsește soluția unui sistem de ecuații algebrice liniare prin metoda Cramer.
Exemplu.
Metoda Cramer  .
.
Decizie.
Matricea principală a sistemului are forma  . Calculați determinantul acestuia (dacă este necesar, consultați articolul):
. Calculați determinantul acestuia (dacă este necesar, consultați articolul): 
Deoarece determinantul matricei principale a sistemului este diferit de zero, sistemul are o soluție unică care poate fi găsită prin metoda lui Cramer.
Compuneți și calculați determinanții necesari ![]() (determinantul se obține prin înlocuirea primei coloane din matricea A cu o coloană de membri liberi, determinantul - prin înlocuirea celei de-a doua coloane cu o coloană de membri liberi, - prin înlocuirea celei de-a treia coloane a matricei A cu o coloană de membri liberi ):
(determinantul se obține prin înlocuirea primei coloane din matricea A cu o coloană de membri liberi, determinantul - prin înlocuirea celei de-a doua coloane cu o coloană de membri liberi, - prin înlocuirea celei de-a treia coloane a matricei A cu o coloană de membri liberi ): 
Găsirea variabilelor necunoscute folosind formule  :
:
Răspuns:
Principalul dezavantaj al metodei lui Cramer (dacă poate fi numită un dezavantaj) este complexitatea calculării determinanților atunci când numărul de ecuații ale sistemului este mai mare de trei.
Rezolvarea sistemelor de ecuații algebrice liniare prin metoda matricei (folosind matricea inversă).
Fie sistemul de ecuații algebrice liniare dat sub formă de matrice , unde matricea A are dimensiunea n cu n și determinantul său este diferit de zero.
Deoarece , atunci matricea A este inversabilă, adică există o matrice inversă . Dacă înmulțim ambele părți ale egalității cu din stânga, atunci obținem o formulă pentru găsirea matricei coloanelor de variabile necunoscute. Deci am obținut soluția sistemului de ecuații algebrice liniare prin metoda matricei.
Exemplu.
Rezolvarea sistemului de ecuații liniare metoda matricei.
Decizie.
Să rescriem sistemul de ecuații sub formă de matrice: 
La fel de
atunci SLAE poate fi rezolvat prin metoda matricei. Folosind matricea inversă, soluția acestui sistem poate fi găsită ca  .
.
Să construim o matrice inversă folosind o matrice de complemente algebrice ale elementelor matricei A (dacă este necesar, vezi articolul): 
Rămâne de calculat - matricea variabilelor necunoscute prin înmulțirea matricei inverse  pe coloana-matrice a membrilor liberi (dacă este necesar, vezi articolul):
pe coloana-matrice a membrilor liberi (dacă este necesar, vezi articolul): 
Răspuns:
 sau într-o altă notație x 1 = 4, x 2 = 0, x 3 = -1.
sau într-o altă notație x 1 = 4, x 2 = 0, x 3 = -1.
Principala problemă în găsirea de soluții la sistemele de ecuații algebrice liniare prin metoda matricei este complexitatea găsirii matricei inverse, în special pentru matrice pătrată de ordin mai mare decât a treia.
Rezolvarea sistemelor de ecuații liniare prin metoda Gauss.
Să presupunem că trebuie să găsim o soluție la un sistem de n ecuații liniare cu n variabile necunoscute 
al cărei determinant al matricei principale este diferit de zero.
Esența metodei Gauss constă în excluderea succesivă a variabilelor necunoscute: în primul rând, x 1 este exclus din toate ecuațiile sistemului, începând de la a doua, apoi x 2 este exclus din toate ecuațiile, începând cu a treia, și așa mai departe, până la doar variabila necunoscută. x n rămâne în ultima ecuație. Se numește un astfel de proces de transformare a ecuațiilor sistemului pentru eliminarea succesivă a variabilelor necunoscute metoda Gauss directă. După ce se termină rularea înainte a metodei Gauss, x n este găsit din ultima ecuație, x n-1 este calculat din penultima ecuație folosind această valoare și așa mai departe, x 1 este găsit din prima ecuație. Procesul de calcul al variabilelor necunoscute la trecerea de la ultima ecuație a sistemului la prima este numit metoda Gauss inversă.
Să descriem pe scurt algoritmul de eliminare a variabilelor necunoscute.
Vom presupune că , deoarece putem întotdeauna realiza acest lucru prin rearanjarea ecuațiilor sistemului. Excludem variabila necunoscută x 1 din toate ecuațiile sistemului, începând de la a doua. Pentru a face acest lucru, adăugați prima ecuație înmulțită cu la a doua ecuație a sistemului, adăugați prima înmulțită cu la a treia ecuație și așa mai departe, adăugați prima înmulțită cu la a n-a ecuație. Sistemul de ecuații după astfel de transformări va lua forma 
unde un  .
.
Am ajunge la același rezultat dacă am exprima x 1 în termeni de alte variabile necunoscute în prima ecuație a sistemului și am înlocui expresia rezultată în toate celelalte ecuații. Astfel, variabila x 1 este exclusă din toate ecuațiile, începând cu a doua.
În continuare, acționăm în mod similar, dar numai cu o parte a sistemului rezultat, care este marcată în figură 
Pentru a face acest lucru, adăugați a doua ecuație înmulțită cu la a treia ecuație a sistemului, adăugați a doua înmulțită cu la a patra ecuație și așa mai departe, adăugați a doua înmulțită cu la a n-a ecuație. Sistemul de ecuații după astfel de transformări va lua forma 
unde un  . Astfel, variabila x 2 este exclusă din toate ecuațiile, începând cu a treia.
. Astfel, variabila x 2 este exclusă din toate ecuațiile, începând cu a treia.
În continuare, trecem la eliminarea necunoscutului x 3, acționând în același timp cu partea din sistem marcată în figură 
Deci continuăm cursul direct al metodei Gauss până când sistemul ia forma 
Din acest moment, începem cursul invers al metodei Gauss: calculăm x n din ultima ecuație ca , folosind valoarea obținută a lui x n găsim x n-1 din penultima ecuație și așa mai departe, găsim x 1 din prima ecuație.
Exemplu.
Rezolvarea sistemului de ecuații liniare metoda gaussiana.
Decizie.
Să excludem variabila necunoscută x 1 din a doua și a treia ecuație a sistemului. Pentru a face acest lucru, la ambele părți ale celei de-a doua și a treia ecuații, adăugăm părțile corespunzătoare ale primei ecuații, înmulțite cu și, respectiv, cu: 
Acum excludem x 2 din a treia ecuație adunând la părțile din stânga și din dreapta părțile din stânga și din dreapta celei de-a doua ecuații, înmulțite cu: 
Pe aceasta, cursul înainte al metodei Gauss este finalizat, începem cursul invers.
Din ultima ecuație a sistemului de ecuații rezultat, găsim x 3: 
Din a doua ecuație obținem .
Din prima ecuație găsim variabila necunoscută rămasă și aceasta completează cursul invers al metodei Gauss.
Răspuns:
X 1 \u003d 4, x 2 \u003d 0, x 3 \u003d -1.
Rezolvarea sistemelor de ecuații algebrice liniare de formă generală.
În cazul general, numărul de ecuații ale sistemului p nu coincide cu numărul de variabile necunoscute n:
Astfel de SLAE-uri pot să nu aibă soluții, să aibă o singură soluție sau să aibă infinite de soluții. Această afirmație se aplică și sistemelor de ecuații a căror matrice principală este pătrată și degenerată.
Teorema Kronecker-Capelli.
Înainte de a găsi o soluție la un sistem de ecuații liniare, este necesar să se stabilească compatibilitatea acestuia. Răspunsul la întrebarea când SLAE este compatibil și când este incompatibil dă Teorema Kronecker–Capelli:
pentru ca un sistem de p ecuații cu n necunoscute (p poate fi egal cu n ) să fie consistent este necesar și suficient ca rangul matricei principale a sistemului să fie egal cu rangul matricei extinse, adică Rank( A)=Rang(T).
Să considerăm ca exemplu aplicarea teoremei Kronecker-Cappelli pentru determinarea compatibilității unui sistem de ecuații liniare.
Exemplu.
Aflați dacă sistemul de ecuații liniare are  solutii.
solutii.
Decizie.
 . Să folosim metoda limitării minorilor. Minor de ordinul doi
. Să folosim metoda limitării minorilor. Minor de ordinul doi  diferit de zero. Să trecem peste minorii de ordinul trei care îl înconjoară:
diferit de zero. Să trecem peste minorii de ordinul trei care îl înconjoară: 
Deoarece toți minorii de ordinul al treilea învecinați sunt egali cu zero, rangul matricei principale este de doi.
La rândul său, rangul matricei augmentate  este egal cu trei, deoarece minorul de ordinul trei
este egal cu trei, deoarece minorul de ordinul trei 
diferit de zero.
Prin urmare, Rang(A) , prin urmare, conform teoremei Kronecker-Capelli, putem concluziona că sistemul original de ecuații liniare este inconsecvent.
Răspuns:
Nu există un sistem de soluții.
Deci, am învățat să stabilim inconsistența sistemului folosind teorema Kronecker-Capelli.
Dar cum să găsești soluția SLAE dacă compatibilitatea acestuia este stabilită?
Pentru a face acest lucru, avem nevoie de conceptul de bază minoră a unei matrice și de teorema privind rangul unei matrice.
Se numește minorul de ordin superior al matricei A, altul decât zero de bază.
Din definirea bazei minore rezultă că ordinea acesteia este egală cu rangul matricei. Pentru o matrice A diferită de zero, pot exista mai multe minore de bază; există întotdeauna un minor de bază.
De exemplu, luați în considerare matricea  .
.
Toate minorele de ordinul trei ale acestei matrice sunt egale cu zero, deoarece elementele celui de-al treilea rând al acestei matrice sunt suma elementelor corespunzătoare din primul și al doilea rând.
Următorii minori de ordinul doi sunt de bază, deoarece nu sunt zero 
Minorii  nu sunt de bază, deoarece sunt egale cu zero.
nu sunt de bază, deoarece sunt egale cu zero.
Teorema rangului matricei.
Dacă rangul unei matrici de ordinul p cu n este r, atunci toate elementele rândurilor (și coloanelor) ale matricei care nu formează baza minoră aleasă sunt exprimate liniar în termenii elementelor corespunzătoare ale rândurilor (și coloanelor). ) care formează baza minoră.
Ce ne oferă teorema rangului matricei?
Dacă, prin teorema Kronecker-Capelli, am stabilit compatibilitatea sistemului, atunci alegem orice minor de bază al matricei principale a sistemului (ordinea sa este egală cu r) și excludem din sistem toate ecuațiile care nu formează minorul de bază ales. SLAE obținut în acest fel va fi echivalent cu cel inițial, deoarece ecuațiile aruncate sunt încă redundante (conform teoremei rangului matricei, ele sunt o combinație liniară a ecuațiilor rămase).
Ca urmare, după eliminarea ecuațiilor excesive ale sistemului, sunt posibile două cazuri.
Dacă numărul de ecuații r din sistemul rezultat este egal cu numărul de variabile necunoscute, atunci acesta va fi definit și singura soluție poate fi găsită prin metoda Cramer, metoda matricei sau metoda Gauss.
Exemplu.
 .
.
Decizie.
Rangul matricei principale a sistemului  este egal cu doi, deoarece minorul de ordinul doi
este egal cu doi, deoarece minorul de ordinul doi  diferit de zero. Rang matrice extins
diferit de zero. Rang matrice extins  este, de asemenea, egal cu doi, deoarece singurul minor de ordinul al treilea este egal cu zero
este, de asemenea, egal cu doi, deoarece singurul minor de ordinul al treilea este egal cu zero 
iar minorul de ordinul doi considerat mai sus este diferit de zero. Pe baza teoremei Kronecker-Capelli, se poate afirma compatibilitatea sistemului original de ecuații liniare, deoarece Rank(A)=Rank(T)=2 .
Ca bază minoră, luăm . Este format din coeficienții primei și celei de-a doua ecuații: 
A treia ecuație a sistemului nu participă la formarea minorului de bază, așa că o excludem din sistemul bazat pe teorema rangului matricei: 
Astfel am obținut un sistem elementar de ecuații algebrice liniare. Să o rezolvăm prin metoda lui Cramer: 
Răspuns:
x 1 \u003d 1, x 2 \u003d 2.
Dacă numărul de ecuații r din SLAE rezultat este mai mic decât numărul de variabile necunoscute n, atunci lăsăm termenii care formează minorul de bază în părțile din stânga ecuațiilor și transferăm termenii rămași în părțile din dreapta ale ecuațiilor lui sistemul cu semnul opus.
Variabilele necunoscute (există r dintre ele) rămase în partea stângă a ecuațiilor se numesc principal.
Sunt numite variabile necunoscute (există n - r dintre ele) care au ajuns în partea dreaptă liber.
Acum presupunem că variabilele necunoscute libere pot lua valori arbitrare, în timp ce principalele r variabile necunoscute vor fi exprimate în termeni de variabile necunoscute libere într-un mod unic. Expresia lor poate fi găsită prin rezolvarea SLAE rezultată prin metoda Cramer, metoda matricei sau metoda Gauss.
Să luăm un exemplu.
Exemplu.
Rezolvarea sistemului de ecuații algebrice liniare  .
.
Decizie.
Aflați rangul matricei principale a sistemului  prin metoda minorilor limitrofe. Să luăm un 1 1 = 1 ca un minor de ordinul întâi diferit de zero. Să începem să căutăm un minor de ordinul doi diferit de zero în jurul acestui minor:
prin metoda minorilor limitrofe. Să luăm un 1 1 = 1 ca un minor de ordinul întâi diferit de zero. Să începem să căutăm un minor de ordinul doi diferit de zero în jurul acestui minor: 
Așa că am găsit un minor diferit de zero de ordinul doi. Să începem să căutăm un minor de ordinul al treilea care nu se limitează la zero: 
Astfel, rangul matricei principale este de trei. Rangul matricei augmentate este, de asemenea, egal cu trei, adică sistemul este consecvent.
Minorul non-zero găsit de ordinul al treilea va fi luat drept cel de bază.
Pentru claritate, arătăm elementele care formează baza minoră: 
Lăsăm termenii care participă la minorul de bază în partea stângă a ecuațiilor sistemului și transferăm restul cu semne opuse în partea dreaptă: 
Oferim variabilelor necunoscute libere x 2 și x 5 valori arbitrare, adică luăm ![]() , unde sunt numere arbitrare. În acest caz, SLAE ia forma
, unde sunt numere arbitrare. În acest caz, SLAE ia forma 
Rezolvăm sistemul elementar de ecuații algebrice liniare obținut prin metoda Cramer: 
Prin urmare, .
În răspuns, nu uitați să indicați variabile necunoscute gratuite.
Răspuns:
Unde sunt numerele arbitrare.
Rezuma.
Pentru a rezolva un sistem de ecuații algebrice liniare de formă generală, aflăm mai întâi compatibilitatea acestuia folosind teorema Kronecker-Capelli. Dacă rangul matricei principale nu este egal cu rangul matricei extinse, atunci ajungem la concluzia că sistemul este inconsecvent.
Dacă rangul matricei principale este egal cu rangul matricei extinse, atunci alegem minorul de bază și renunțăm la ecuațiile sistemului care nu participă la formarea minorului de bază ales.
Dacă ordinea bazei minore este egală cu numărul de variabile necunoscute, atunci SLAE are o soluție unică, care poate fi găsită prin orice metodă cunoscută de noi.
Dacă ordinea minorului de bază este mai mică decât numărul de variabile necunoscute, atunci în partea stângă a ecuațiilor sistemului lăsăm termenii cu principalele variabile necunoscute, transferăm termenii rămași în partea dreaptă și atribuim valori arbitrare la variabilele necunoscute libere. Din sistemul de ecuații liniare rezultat, găsim principalele variabile necunoscute prin metoda Cramer, metoda matricei sau metoda Gauss.
Metoda Gauss pentru rezolvarea sistemelor de ecuații algebrice liniare de formă generală.
Folosind metoda Gauss, se pot rezolva sisteme de ecuații algebrice liniare de orice fel fără investigația lor preliminară pentru compatibilitate. Procesul de excludere succesivă a variabilelor necunoscute face posibilă tragerea unei concluzii atât despre compatibilitatea, cât și despre inconsecvența SLAE, iar dacă există o soluție, face posibilă găsirea acesteia.
Din punct de vedere al muncii computaționale, este de preferat metoda gaussiană.
Vezi descrierea sa detaliată și exemplele analizate în articolul Metoda Gauss pentru rezolvarea sistemelor de ecuații algebrice liniare de formă generală.
Înregistrarea soluției generale a sistemelor algebrice liniare omogene și neomogene folosind vectorii sistemului fundamental de soluții.
În această secțiune, ne vom concentra asupra sistemelor comune omogene și neomogene de ecuații algebrice liniare care au un număr infinit de soluții.
Să ne ocupăm mai întâi de sisteme omogene.
Sistem de decizie fundamental a unui sistem omogen de p ecuații algebrice liniare cu n variabile necunoscute este o mulțime de (n – r) soluții liniar independente ale acestui sistem, unde r este ordinul bazei minore a matricei principale a sistemului.
Dacă desemnăm soluții liniar independente ale unui SLAE omogen ca X (1) , X (2) , …, X (n-r) (X (1) , X (2) , …, X (n-r) sunt coloane matrice de dimensiunea n prin 1 ) , atunci soluția generală a acestui sistem omogen este reprezentată ca o combinație liniară de vectori ai sistemului fundamental de soluții cu coeficienți constanți arbitrari С 1 , С 2 , …, С (n-r), adică .
Ce înseamnă termenul de soluție generală a unui sistem omogen de ecuații algebrice liniare (oroslau)?
Semnificația este simplă: formula definește toate soluțiile posibile ale SLAE inițial, cu alte cuvinte, luând orice set de valori ale constantelor arbitrare C 1 , C 2 , ..., C (n-r), conform formulei pe care o avem va obține una dintre soluțiile SLAE omogen original.
Astfel, dacă găsim un sistem fundamental de soluții, atunci putem seta toate soluțiile acestui SLAE omogen ca .
Să arătăm procesul de construire a unui sistem fundamental de soluții pentru un SLAE omogen.
Alegem minorul de bază al sistemului original de ecuații liniare, excludem toate celelalte ecuații din sistem și transferăm în partea dreaptă a ecuațiilor sistemului cu semne opuse toți termenii care conțin variabile necunoscute libere. Să dăm variabilelor necunoscute libere valorile 1,0,0,…,0 și să calculăm principalele necunoscute prin rezolvarea sistemului elementar rezultat de ecuații liniare în orice mod, de exemplu, prin metoda Cramer. Astfel, se va obține X (1) - prima soluție a sistemului fundamental. Dacă dăm necunoscutelor libere valorile 0,1,0,0,…,0 și calculăm principalele necunoscute, atunci obținem X (2) . etc. Dacă dăm variabilelor necunoscute libere valorile 0,0,…,0,1 și calculăm principalele necunoscute, atunci obținem X (n-r) . Așa se va construi sistemul fundamental de soluții al SLAE omogen și soluția sa generală poate fi scrisă sub forma .
Pentru sistemele neomogene de ecuații algebrice liniare, soluția generală este reprezentată ca
Să ne uităm la exemple.
Exemplu.
Aflați sistemul fundamental de soluții și soluția generală a unui sistem omogen de ecuații algebrice liniare  .
.
Decizie.
Rangul matricei principale a sistemelor omogene de ecuații liniare este întotdeauna egal cu rangul matricei extinse. Să găsim rangul matricei principale prin metoda franjării minorilor. Ca un minor de ordinul întâi, diferit de zero, luăm elementul a 1 1 = 9 din matricea principală a sistemului. Găsiți minorul care se limitează la zero de ordinul doi: 
Se găsește un minor de ordinul doi, diferit de zero. Să trecem prin minorii de ordinul trei care se învecinează cu acesta în căutarea unuia diferit de zero: 
Toți minorii învecinați de ordinul al treilea sunt egali cu zero, prin urmare, rangul matricei principale și extinse este de doi. Să luăm minorul de bază. Pentru claritate, notăm elementele sistemului care îl formează: 
A treia ecuație a SLAE original nu participă la formarea minorului de bază, prin urmare, poate fi exclusă: 
Lăsăm termenii care conțin principalele necunoscute în partea dreaptă a ecuațiilor și transferăm termenii cu necunoscute libere în partea dreaptă:
Să construim un sistem fundamental de soluții la sistemul omogen original de ecuații liniare. Sistemul fundamental de soluții al acestui SLAE constă din două soluții, deoarece SLAE original conține patru variabile necunoscute, iar ordinea minorului său de bază este două. Pentru a găsi X (1), dăm variabilelor necunoscute libere valorile x 2 \u003d 1, x 4 \u003d 0, apoi găsim principalele necunoscute din sistemul de ecuații  .
.